
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
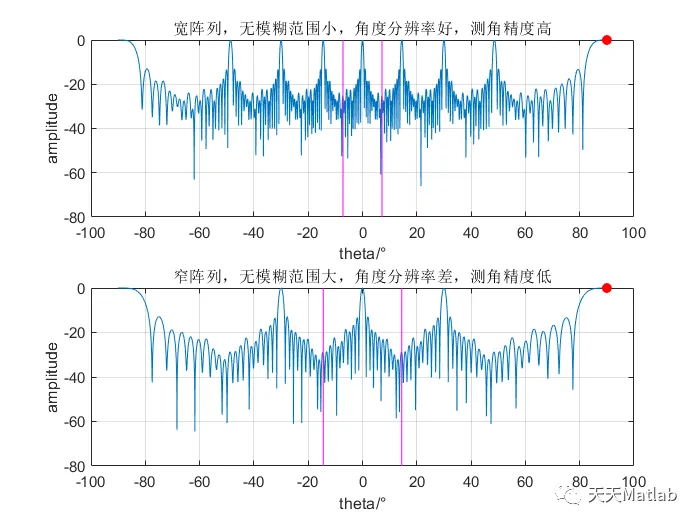
伴随着近年来经济社会的发展与人工智能技术的进步,无人驾驶技术作为一种能够提升人类出行安全系数,便利社会生产生活的有效手段,逐渐成为学术界与工业界研究的热点.毫米波雷达凭借其体积小,成本低以及工作性能受恶劣天气影响较小等特点,在无人驾驶传感器中具有不可替代的作用和地位.但由于受到系统射频以及基带硬件成本约束,现有的中长距车载毫米波雷达很难在低复杂度系统中达到令人满意的参数估计性能.另一方面,相比于中长距车载毫米波雷达,拥有较高距离分辨率的短距车载毫米波雷达需要设计更加精确的算法以实现更高的系统性能,本文基于Matlab仿真分析来探讨车载毫米波雷达信号处理中的各类模糊问题。
⛄ 部分代码
%% 距离模糊
%距离模糊其实在车载毫米波雷达中并没有太多考虑,因为从数据处理的角度,我们可以通过调节chirp的斜率来使得Rmax很大很大。
%这里探讨当fadc<Fif时,频率在fadc到Fif这段区间下对应的目标它们在距离fft后的图谱中会是怎样的表现。
%仿真单个目标,其频率从0一直变化到Fif,双路采样,fadc小于Fif
clear all; close all; clc;
Fif = 20e6;
fadc = 15e6;
Nsamples = 256;
t = (0:1/fadc:Nsamples/fadc);
f = 0:200e3:20e6;
for ii = 1: length(f)
signal = exp(1i*2*pi*f(ii)*t); %复数的形式
signal_I = cos(2*pi*f(ii)*t);
signal_Q = sin(2*pi*f(ii)*t);
signal = signal_I+1i*signal_Q;
signal = awgn(signal,20); %加点噪声
fftOut = fft(signal,Nsamples);
xaxis = linspace(0,fadc,Nsamples);
figure(1);
plot(xaxis,abs(fftOut));grid on; title({['信号的频域图','Fif = 20MHz , fadc = 15MHz'];['目标频率从0变化到Fif']});xlabel('频率/Hz');ylabel('幅度');
pause(0.1);
end
⛄ 运行结果
⛄ 参考文献
[1] 曹孟德. 车载毫米波雷达信号处理算法研究[D]. 东南大学, 2019.
[2] 杨凯和. 基于毫米波雷达的汽车主动防撞预警系统信号分析与处理[D]. 吉林大学, 2011.
[3] 淦玲莉, 徐加, 张飞. 基于最大熵法的汽车毫米波雷达信号的处理[J]. 探测与控制学报, 2006, 28(5):4.
[4] 汪茂盛, 胡连强, 谭方培,等. 车载毫米波雷达的电动调节系统设计探讨[J]. 上海汽车, 2018(4):4.
[5] 袁子雄,赵鲁豫. 基于信息可编码超材料技术的毫米波雷达设计[J]. 现代导航, 2020, 11(5):7.
