
前言
对于饮料、医药、食品等生产厂家而言,瓶盖外观缺陷是产品生产制造环节常见的问题,由于对产品包装精细化、品质和连续批量生产的要求越来越高,传统人工检测容易造成漏检、误检,导致不良品流出且效率低,市场对瓶盖原厂质量检测提出了新的挑战。基于AI的全自动瓶盖视觉检测系统的出现,很好地解决了这一难点,成为越来越生产业企业新的选择。瓶盖检测系统既能确保包装质量,能对瓶盖材质进行检测,避免不符合食品安全标准的材料进入生产工序,保障了饮料食品的质量安全。
本系统基于YOLOv5,采用登录注册进行用户管理,对于图片、视频和摄像头捕获的实时画面,可检测瓶盖的位置,系统支持结果记录、展示和保存,每次检测的结果记录在表格中。对此这里给出博主设计的界面,同款的简约风,功能也可以满足图片、视频和摄像头的识别检测,希望大家可以喜欢,初始界面如下图:

检测类别时的界面截图(点击图片可放大)如下图,可识别画面中存在的多个类别,也可开启摄像头或视频检测:

详细的功能演示效果参见博主的B站视频或下一节的动图演示,觉得不错的朋友敬请点赞、关注加收藏!系统UI界面的设计工作量较大,界面美化更需仔细雕琢,大家有任何建议或意见和可在下方评论交流。
1. 效果演示
软件的颜值和功能同样重要,首先我们还是通过动图看一下识别的效果,系统主要实现的功能是对图片、视频和摄像头画面中的瓶盖进行识别,识别的结果可视化显示在界面和图像中,另外提供多个目标的显示选择功能,演示效果如下。
(一)系统介绍
基于深度学习的瓶盖检测系统主要用于日常场景中瓶盖的检测识别,也可用于传送带等加工回收场景,检测瓶盖目标在图像中的类别、位置、数目、置信度等;可对图片、视频文件读取的图像,或从摄像头获取的实时画面中的瓶盖进行识别,算法模型可选择替换;系统界面包含用户注册、登录功能,方便用户进行管理和使用;识别结果可视化,结果实时显示并能够进行目标逐个标注、显示和数据展示;画面显示窗口表格记录历史结果,图片结果可点击按钮保存,方便后续查阅使用。

(二)技术特点
(1)检测算法采用YOLOv5实现,模型可切换更新;
(2)选择图片、视频或摄像头方式识别瓶盖;
(3)提供目标数、类别、位置等结果展示、切换和保存功能;
(4)支持用户登录、注册、管理,界面缩放、可视化等功能;
(三)选择图片识别
系统允许选择图片文件进行识别,点击图片选择按钮图标选择图片后,显示所有识别的结果,可通过下拉选框查看单个结果,以便具体判断某一特定目标。本功能的界面展示如下图所示:

(四)视频识别效果展示
很多时候我们需要识别一段视频中的多个瓶盖,这里设计了视频选择功能。点击视频按钮可选择待检测的视频,系统会自动解析视频逐帧识别多个瓶盖,并将瓶盖的分类和计数结果记录在右下角表格中,效果如下图所示:

2. 瓶盖数据集及训练
本文实验的瓶盖数据集包含正面、侧面,不同光照背景,以及不同类型的瓶盖的图像。其中,训练集1601张图片,验证集105张图片,测试集67张图片,共计1773张图片,选取部分数据部分样本数据集如图所示。

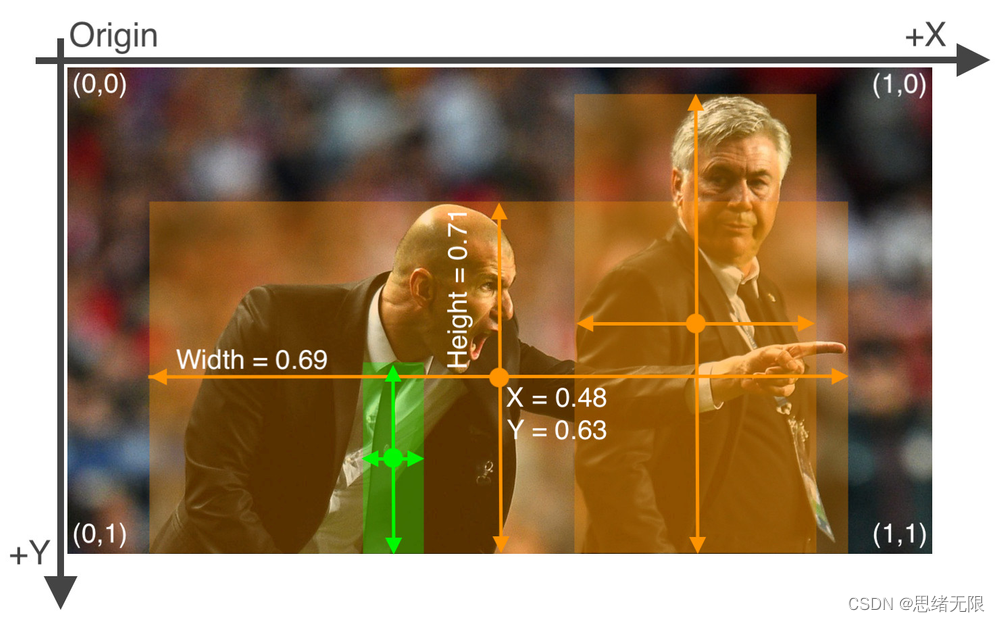
每张图像都包含一个标准文件,在.txt的文本文件的每一行都描述了一个边界框。检测框的坐标值经过图像尺寸归一化处理(即值介于 0 和 1 之间)
data.yaml 是数据配置文件,记录数据集的详细信息。有以下参数:
1、train、test和val:训练集、测试集和验证集的位置。
2、nc:数据集中的类别数。
3、names:数据集中类别的名称。
python train: ./BottleCap/images/train val: ./BottleCap/images/valid test: ./BottleCap/images/test nc: 1 names: ['bottle-cap']
结果如下:

使用 train.py 训练:打开此代码,查看def parse_opt()。
python parser = argparse.ArgumentParser() parser.add_argument('--weights', type=str, default='yolov5s.pt', help='initial weights path') parser.add_argument('--cfg', type=str, default='models/yolov5s.yaml', help='model.yaml path') parser.add_argument('--data', type=str, default='/BottleCap/bottle-cap.yaml', help='garbage.yaml path') parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path') parser.add_argument('--epochs', type=int, default=300) parser.add_argument('--batch-size', type=int, default=2, help='total batch size for all GPUs') parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes') parser.add_argument('--rect', action='store_true', help='rectangular training') parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training') parser.add_argument('--nosave', action='store_true', help='only save final checkpoint') parser.add_argument('--notest', action='store_true', help='only test final epoch') parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check') parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters') parser.add_argument('--bucket', type=str, default='', help='gsutil bucket') parser.add_argument('--cache-images', action='store_true', help='cache images for faster training') parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training') parser.add_argument('--name', default='', help='renames experiment folder exp{N} to exp{N}_{name} if supplied') parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu') parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%') parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset') parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer') parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode') parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify') parser.add_argument('--logdir', type=str, default='BottleCap/logs', help='logging directory') parser.add_argument('--workers', type=int, default=1, help='maximum number of dataloader workers') opt = parser.parse_args()
weights 参数是预训练权重,如果这里设置为空的话,重新训练模型。
参数是模型配置文件,要使用自定义网络,请创建一个新文件并在运行时使用cfg标志指定它。
data 参数是数据集配置文件,里面主要存放数据集的类别和路径。
hyp 参数是超参数配置文件,超参数里面包含了大量的参数信息。默认的data/hyp.scratch.yaml如下。
python lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3) lrf: 0.2 # final OneCycleLR learning rate (lr0 * lrf) momentum: 0.937 # SGD momentum/Adam beta1 weight_decay: 0.0005 # optimizer weight decay 5e-4 warmup_epochs: 3.0 # warmup epochs (fractions ok) warmup_momentum: 0.8 # warmup initial momentum warmup_bias_lr: 0.1 # warmup initial bias lr box: 0.05 # box loss gain cls: 0.5 # cls loss gain cls_pw: 1.0 # cls BCELoss positive_weight obj: 1.0 # obj loss gain (scale with pixels) obj_pw: 1.0 # obj BCELoss positive_weight iou_t: 0.20 # IoU training threshold anchor_t: 4.0 # anchor-multiple threshold # anchors: 0 # anchors per output grid (0 to ignore) fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5) hsv_h: 0.015 # image HSV-Hue augmentation (fraction) hsv_s: 0.7 # image HSV-Saturation augmentation (fraction) hsv_v: 0.4 # image HSV-Value augmentation (fraction) degrees: 0.0 # image rotation (+/- deg) translate: 0.1 # image translation (+/- fraction) scale: 0.5 # image scale (+/- gain) shear: 0.0 # image shear (+/- deg) perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 flipud: 0.0 # image flip up-down (probability) fliplr: 0.5 # image flip left-right (probability) mosaic: 1.0 # image mosaic (probability) mixup: 0.0 # image mixup (probability)
epochs 参数是训练轮数,默认300 次。
batch_size 参数是每批次输入的数据量,取值为 -1 ,将自动调节。
imgsize、img、img-size,训练集和测试集图片的大小,默认 640*640。
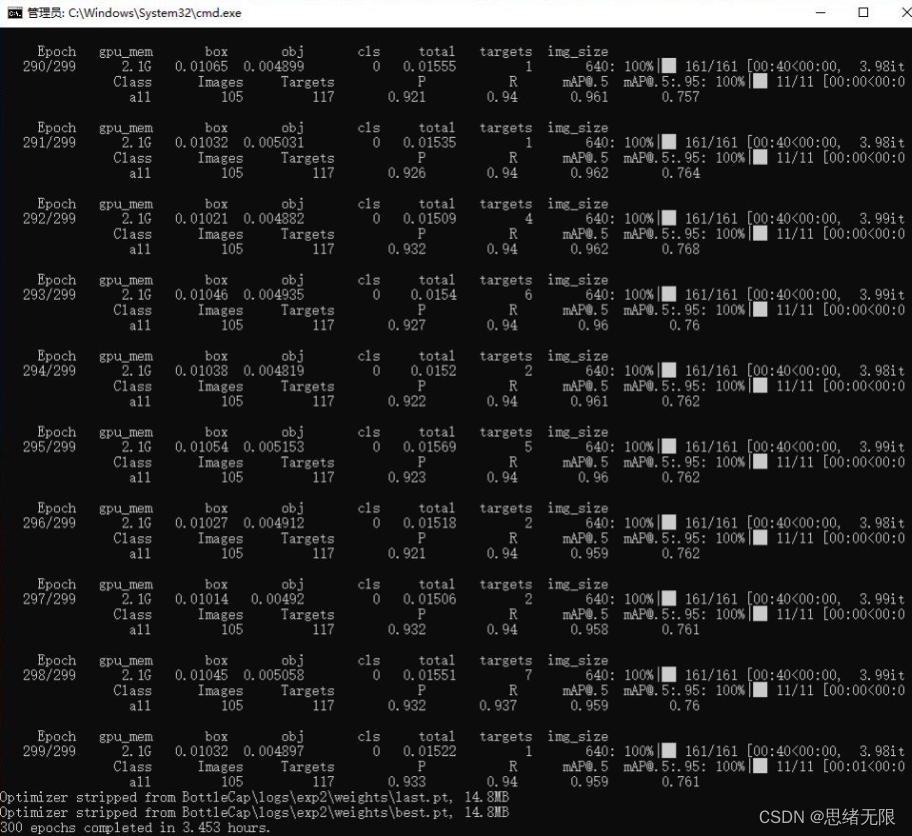
以上就是YOLOv5的整体介绍,接下来进行训练。本项目使用Yolov5训练了一个瓶盖检测模型,在笔记本的3070显卡下训练了300 epoch,在终端运行的截图如下:
在深度学习中,我们通常通过损失函数下降的曲线来观察模型训练的情况。而YOLOv5训练时主要包含三个方面的损失:矩形框损失(box_loss)、置信度损失(obj_loss)和分类损失(cls_loss),在训练结束后,我们也可以在logs目录下找到生成对若干训练过程统计图。下图为博主训练舰船类识别的模型训练曲线图。

一般我们会接触到两个指标,分别是召回率recall和精度precision,两个指标p和r都是简单地从一个角度来判断模型的好坏,均是介于0到1之间的数值,其中接近于1表示模型的性能越好,接近于0表示模型的性能越差,为了综合评价目标检测的性能,一般采用均值平均密度map来进一步评估模型的好坏。我们通过设定不同的置信度的阈值,可以得到在模型在不同的阈值下所计算出的p值和r值,一般情况下,p值和r值是负相关的,绘制出来可以得到如下图所示的曲线,其中曲线的面积我们称AP,目标检测模型中每种目标可计算出一个AP值,对所有的AP值求平均则可以得到模型的mAP值。

以PR-curve为例,你可以看到我们的模型在验证集上的均值平均准确率为0.959。
3. 瓶盖检测识别
在训练完成后得到最佳模型,接下来我们将帧图像输入到这个网络进行预测,运行testPicture.py从而得到预测结果
python if __name__ == '__main__': img_path = "./UI_rec/test_/20220410_024444_jpg.rf.c7a82c73f24f2212609a325acbe6e169.jpg" image = cv_imread(img_path) image = cv2.resize(image, (850, 500)) img0 = image.copy() img = letterbox(img0, new_shape=imgsz)[0] img = np.stack(img, 0) img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416 img = np.ascontiguousarray(img) pred, useTime = predict(img) det = pred[0] p, s, im0 = None, '', img0 if det is not None and len(det): # 如果有检测信息则进入 det[:, :4] = scale_coords(img.shape[1:], det[:, :4], im0.shape).round() # 把图像缩放至im0的尺寸 number_i = 0 # 类别预编号 detInfo = [] for *xyxy, conf, cls in reversed(det): # 遍历检测信息 c1, c2 = (int(xyxy[0]), int(xyxy[1])), (int(xyxy[2]), int(xyxy[3])) # 将检测信息添加到字典中 detInfo.append([names[int(cls)], [c1[0], c1[1], c2[0], c2[1]], '%.2f' % conf]) number_i += 1 # 编号数+1 label = '%s %.2f' % (names[int(cls)], conf) # 画出检测到的目标物 plot_one_box(image, xyxy, label=label, color=colors[int(cls)]) # 实时显示检测画面 cv2.imshow('Stream', image) # if cv2.waitKey(1) & 0xFF == ord('q'): # break c = cv2.waitKey(0) & 0xff

博主对整个系统进行了详细测试,最终开发出一版流畅得到清新界面,就是博文演示部分的展示,完整的UI界面、测试图片视频、代码文件,以及Python离线依赖包(方便安装运行,也可自行配置环境),均已打包上传,感兴趣的朋友可以通过下载链接获取。

