工业机器人,即面向工业领域的机器人。工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
发展历史:
20世纪50年代末,工业机器人最早开始投入使用。约瑟夫·恩格尔贝格(Joseph F.Englberger)利用伺服系统的相关灵感,与乔治·德沃尔(GeorgeDevol)共同开发了一台工业机器人——“尤尼梅特”(Unimate),率先于1961年在通用汽车的生产车间里开始使用。最初的工业机器人构造相对比较简单,所完成的功能也是捡拾汽车零件并放置到传送带上,对其他的作业环境并没有交互的能力,就是按照预定的基本程序精确地完成同一重复动作。“尤尼梅特”的应用虽然是简单的重复操作,但展示了工业机械化的美好前景,也为工业机器人的蓬勃发展拉开了序幕。自此,在工业生产领域,很多繁重、重复或者毫无意义的流程性作业可以由工业机器人来代替人类完成。
20世纪60年代,工业机器人发展迎来黎明期,机器人的简单功能得到了进一步的发展。机器人传感器的应用提高了机器人的可操作性,包括恩斯特采用的触觉传感器;托莫维奇和博尼在世界上最早的“灵巧手”上用到了压力传感器;麦卡锡对机器人进行改进,加入视觉传感系统,并帮助麻省理工学院推出了世界上第一个带有视觉传感器并能识别和定位积木的机器人系统。此外,利用声呐系统、光电管等技术,工业机器人可以通过环境识别来校正自己的准确位置。
自20世纪60年代中期开始,美国麻省理工学院、斯坦福大学、英国爱丁堡大学等陆续成立了机器人实验室。美国兴起研究第二代带传感器的、“有感觉”的机器人,并向人工智能进发。
20世纪70年代,随着计算机和人工智能技术的发展,机器人进入了实用化时代。像日立公司推出的具有触觉、压力传感器,7轴交流电动机驱动的机器人;美国Milacron公司推出的世界第一台小型计算机控制的机器人,由电液伺服驱动,可跟踪移动物体,用于装配和多功能作业;适用于装配作业的机器人还有像日本山梨大学发明的SCARA平面关节型机器人等。
20世纪70年代末,由美国Unimation公司推出的PUMA系列机器人,为多关节、多CPU二级计算机控制,全电动,有专用VAL语言和视觉、力觉传感器,这标志着工业机器人技术已经完全成熟。PUMA至今仍然工作在工厂第一线。
20世纪80年代,机器人进入了普及期,随着制造业的发展,使工业机器人在发达国家走向普及,并向高速、高精度、轻量化、成套系列化和智能化发展,以满足多品种、少批量的需要。
到了20世纪90年代,随着计算机技术、智能技术的进步和发展,第二代具有一定感觉功能的机器人已经实用化并开始推广,具有视觉、触觉、高灵巧手指、能行走的第三代智能机器人相继出现并开始走向应用。
2020年,中国机器人产业营业收入首次突破1000亿元。“十三五”期间,工业机器人产量从7.2万套增长到21.2万套,年均增长31%。从技术和产品上看,精密减速器、高性能伺服驱动系统、智能控制器、智能一体化关节等关键技术和部件加快突破、创新成果不断涌现,整机性能大幅提升、功能愈加丰富,产品质量日益优化。行业应用也在深入拓展。例如,工业机器人已在汽车、电子、冶金、轻工、石化、医药等52个行业大类、143个行业中类广泛应用。
2022年,嘉腾机器人推出国内首台差速20吨AGV驱动单元,该驱动单元采用差速重载动力模组以及控制策略,增强了产品实用性和耐用性。据悉,重载AGV可用于航天、高压容器、大型基建工程、模块化建筑工程等行业。
组成:
一般来说,工业机器人由三大部分六个子系统组成。
三大部分是机械部分、传感部分和控制部分。
六个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。
应用:
1.在码垛方面的应用
在各类工厂的码垛方面,自动化极高的机器人被广泛应用,人工码垛工作强度大,耗费人力,员工不仅需要承受巨大的压力,而且工作效率低。搬运机器人能够根据搬运物件的特点,以及搬运物件所归类的地方,在保持其形状的和物件的性质不变的基础上,进行高效的分类搬运,使得装箱设备每小时能够完成数百块的码垛任务。在生产线上下料、集装箱的搬运等方面发挥及其重要的作用。
2.在焊接方面的应用
焊接机器人主要承担焊接工作,不同的工业类型有着不同的工业需求,所以常见的焊接机器人有点焊机器人、弧焊机器人、激光机器人等。汽车制造行业是焊接机器人应用最广泛的行业,在焊接难度、焊接数量、焊接质量等方面就有着人工焊接无法比拟的优势。
3.在装配方面的应用
在工业生产中,零件的装配是一件工程量极大的工作,需要大量的劳动力,曾经的人力装配因为出错率高,效率低而逐渐被工业机器人代替。装配机器人的研发,结合了多种技术,包括通讯技术、自动控制、光学原理、微电子技术等。研发人员根据装配流程,编写合适的程序,应用于具体的装配工作。装配机器人的最大特点,就是安装精度高、灵活性大、耐用程度高。因为装配工作复杂精细,所以我们选用装配机器人来进行电子零件,汽车精细部件的安装。
4.在检测方面的应用
机器人具有多维度的附加功能。它能够代替工作人员在特殊岗位上的工作,比如在高危领域如核污染区域、有毒区域、核污染区域、高危未知区域进行探测。还有人类无法具体到达的地方,如病人患病部位的探测、工业瑕疵的探测、在地震救灾现场的生命探测等均有建树。
接下来的几篇文章,浅谈一下实践应用,具体以玻璃涂胶为例:
- 了解工业机器人在玻璃涂胶领域的应用
- 认识工具坐标系的标定方法
- 掌握计时指令的应用
- 掌握人机交互指令的应用
- 掌握等待类指令用法(WaitDI、WaitUnitl 等)
- 认识工业机器人轨迹类应用程序编写
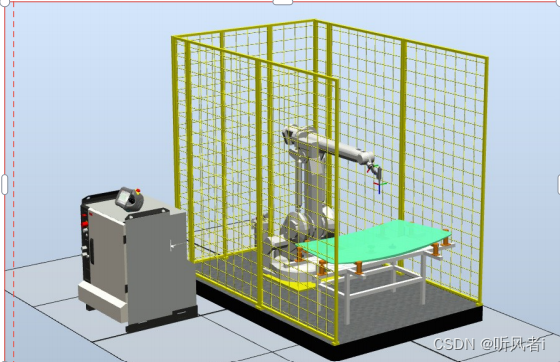
本工作站以汽车前挡风玻璃涂胶为例,利用IRB1410 机器人将胶体均匀地涂抹在玻璃轮廓周围。本工作站中已经预设涂胶效果,需要在此工作站中依次完成I/O 配置、程序数据创建、目标点示教、程序编写及调试,最终完成汽车玻璃的完整涂胶过程。
必要知识储备:
(1)工具坐标系标定方法:
形状不规则的工具可使用4个点来标定新工具坐标系的工具中心点(TCP)。
若需改变坐标系方向,再加两个方向延伸点标定坐标系方向,即6点标定法。
若对TCP精度要求较高,标定坐标系原点时可以采用更多的点位(最多9 个点)

(2)计时指令的应用:
时钟数据“Clock”必须定义为变量类型,最小计时单位为1ms;指令作用:ClkStart:开始计时;ClkStop:停止计时;ClkReset:时钟复位;ClkRead:读取时钟数值。
应用举例:
VAR clock clock1; PERS num CycleTime; PROC rMove() MoveL p1,v100,fine,tool0; ClkReset clock1; ClkStart clock1; MoveL p2,v100,fine,tool0; ClkStop clock1; CycleTime :=ClkRead(clock1);
执行结果:
机器人到达p1点后开始计时,到达p2点后停止计时,之后利用ClkRead读取当前时钟数值,并将其赋值给数值型变量CycleTime,则当前CycleTime的值即为机器人从p1点到p2点的运动时间。
(3)人机交互指令
人机交互指令的作用:显示当前信息或者人工选择确认
1)写屏指令“TPWrite”
指令作用: 将字符串显示在示教器屏幕上
应用举例:TPWrite “The last cycle time is ”\Num:=cycletime;
执行结果:若对应数值型数据cycletime 的数值为5,运行该指令,则示教器屏幕上会显示“Thelast cycle time is 5”。
2)示教器端人工输入数值指令“TPReadNum”
指令作用:通过键盘输入的方式对指定变量进行赋值
应用举例:
TPReadNum reg1,”how many products should be produced ?”;
执行结果:
运行该指令,示教器屏幕上会出现数值输入键盘,假设人工输入5,则对应的reg1被赋值为5。
3)屏幕上显示不同选项供用户选择指令“TPReadFK”
指令作用:支持最多5个选项供用户选择
应用举例:TPReadFK reg1, “More?”, stEmpty, stEmpty, “Yes”, “No”;
执行结果:
运行该指令,屏幕上的显示效果如图所示。若人工选择为Yes,则对应reg1 被赋值为选项的编
号4;则后续可以根据reg1 的不同数值执行不同的指令。