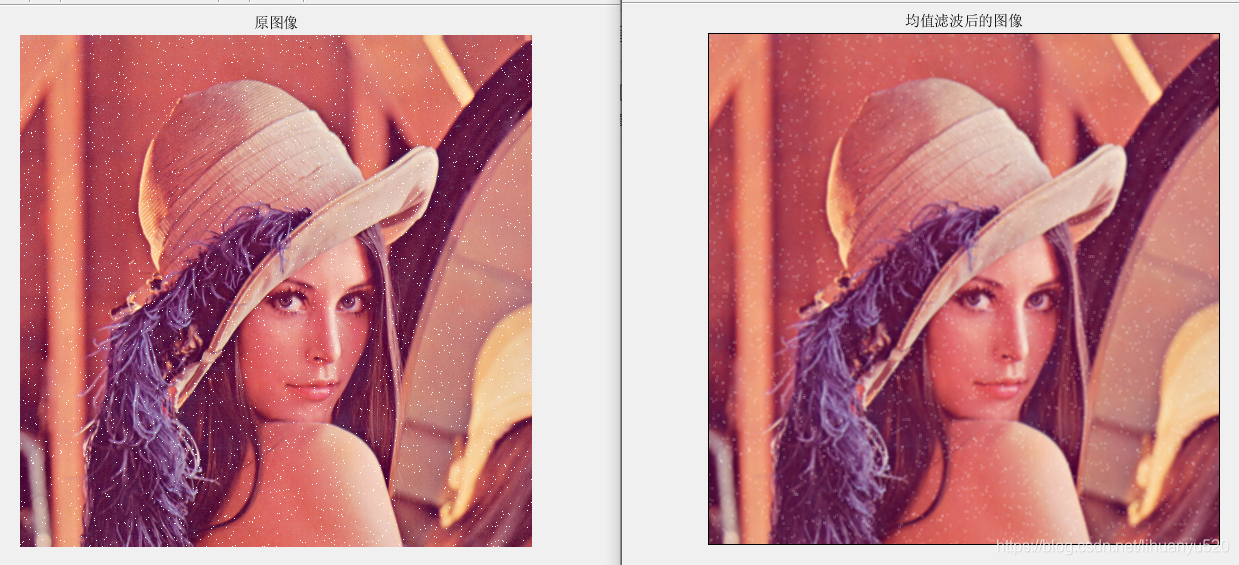
1.均值滤波
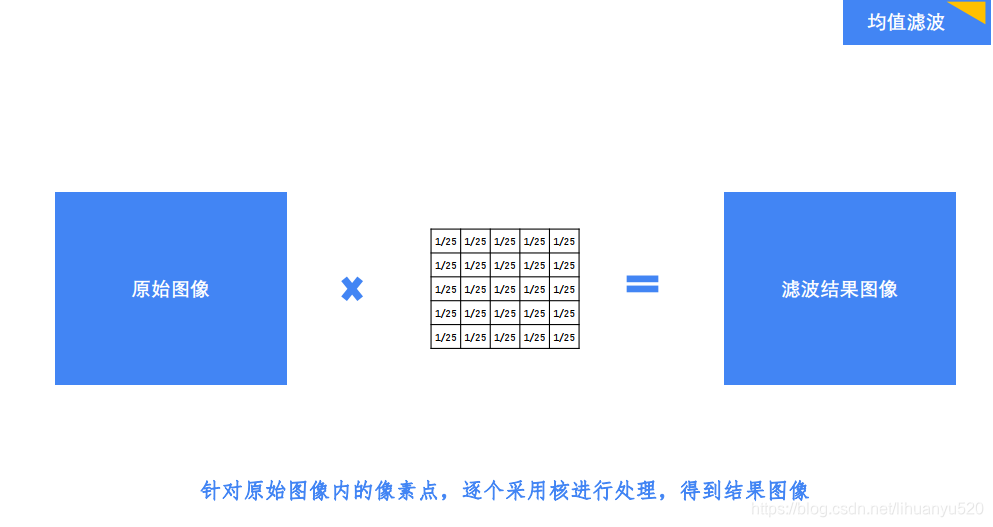
clc;clear all; img = imread('C:\Users\lihuanyu\Desktop\opencv\image\lenaNoise.png'); figure; imshow(img),title("原图像"); img_R = img(:,:,1); img_G = img(:,:,2); img_B = img(:,:,3); %纵,横,通道数 [ROW,COL,DIM] = size(img); %构造(3,3)的矩阵 R = zeros(ROW,COL); G = zeros(ROW,COL); B = zeros(ROW,COL); funBox = zeros(3,3); for i = 1:ROW - 2 for j = 1:COL - 2 funBox = img_R(i:i+2,j:j+2); s = sum(funBox(:))/9; R(i+1,j+1) = s; funBox = img_G(i:i+2,j:j+2); s = sum(funBox(:))/9; G(i+1,j+1) = s; funBox = img_B(i:i+2,j:j+2); s = sum(funBox(:))/9; B(i+1,j+1) = s; end; end; img_filter(:,:,1) = R/255; img_filter(:,:,2) = G/255; img_filter(:,:,3) = B/255; figure(2); imshow(img_filter),title("均值滤波后的图像");
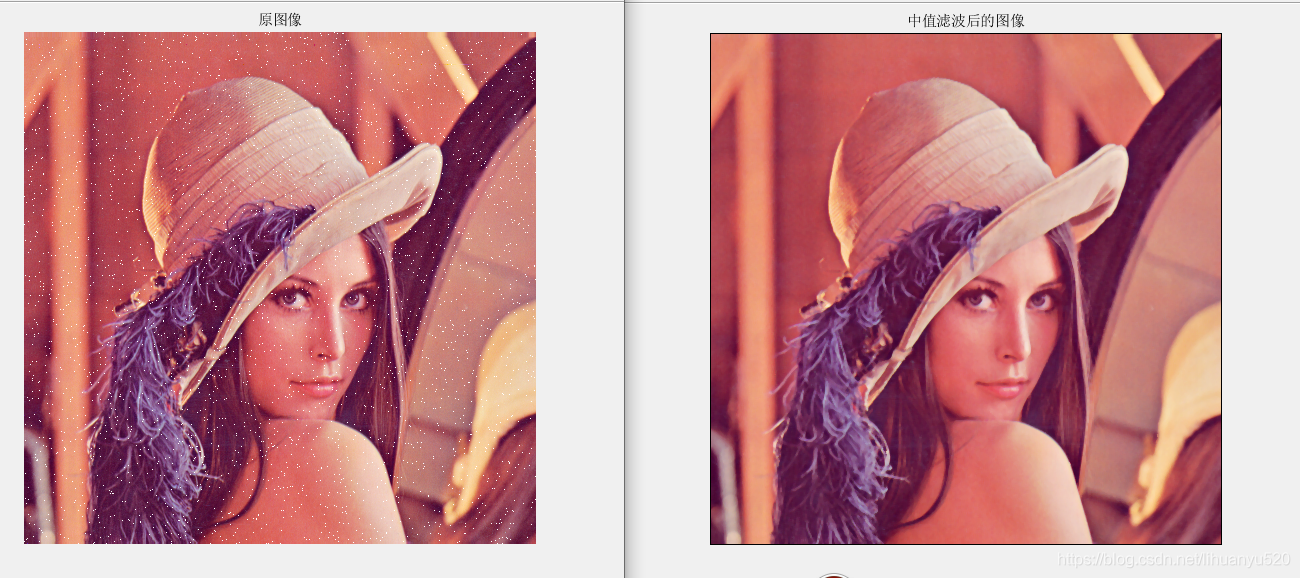
2. 中值滤波
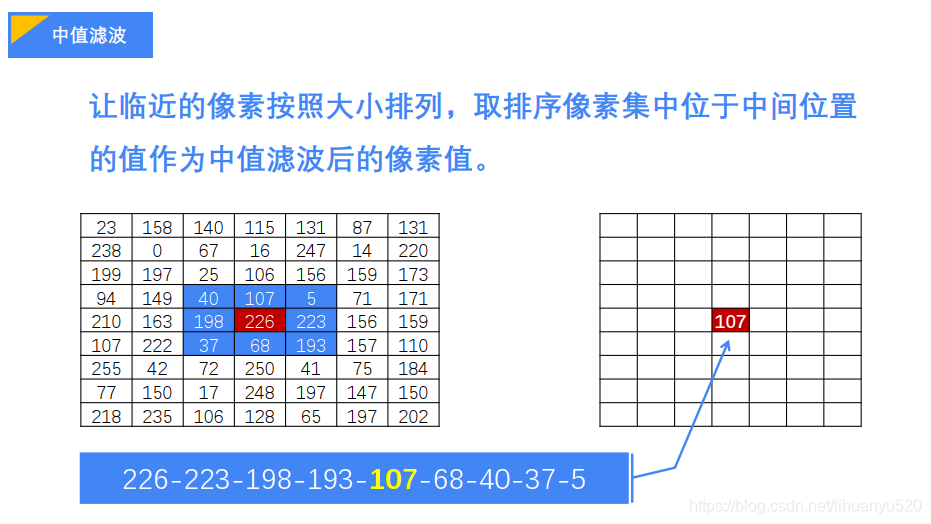
clc;clear all; img = imread('C:\Users\lihuanyu\Desktop\opencv\image\lenaNoise.png'); figure; imshow(img),title("原图像"); img_R = img(:,:,1); img_G = img(:,:,2); img_B = img(:,:,3); %纵,横,通道数 [ROW,COL,DIM] = size(img); %构造(3,3)的矩阵 R = zeros(ROW,COL); G = zeros(ROW,COL); B = zeros(ROW,COL); funBox = zeros(3,3); for i = 1:ROW - 2 for j = 1:COL - 2 funBox = img_R(i:i+2,j:j+2); s = sort(funBox(:)); R(i+1,j+1) = s(5); funBox = img_G(i:i+2,j:j+2); s = sort(funBox(:)); G(i+1,j+1) = s(5); funBox = img_B(i:i+2,j:j+2); s = sort(funBox(:)); B(i+1,j+1) = s(5); end; end; img_filter(:,:,1) = R/255; img_filter(:,:,2) = G/255; img_filter(:,:,3) = B/255; figure(2); imshow(img_filter),title("中值滤波后的图像");
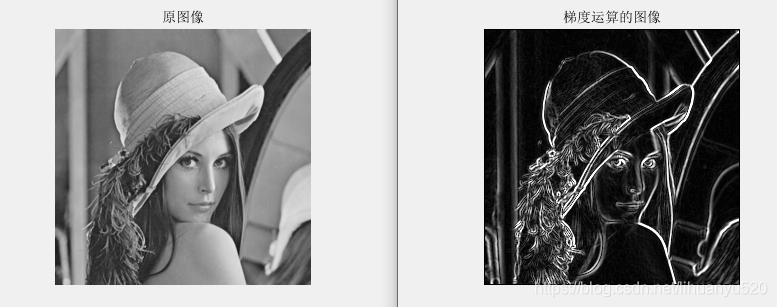
3. 梯度锐化(sobel算子)
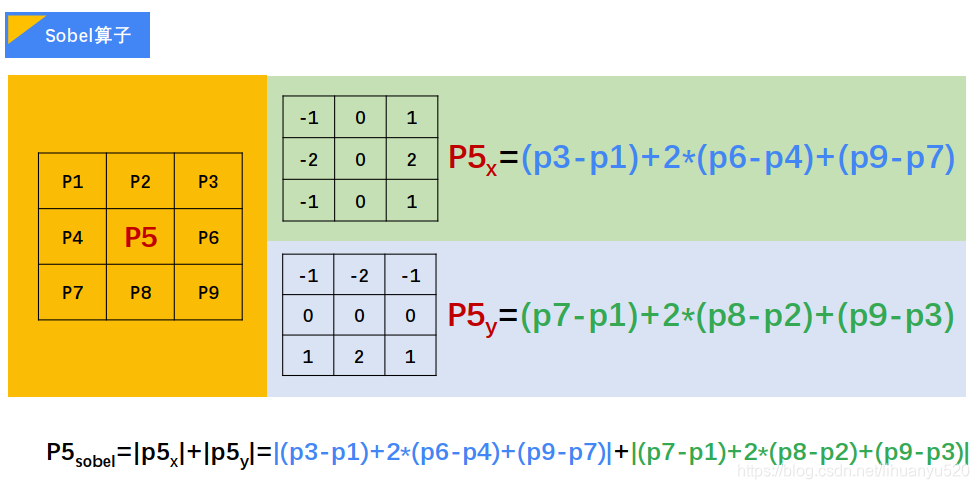
clc;clear all; img = imread('C:\Users\lihuanyu\Desktop\opencv\image\lena256.bmp'); figure; imshow(img),title("原图像"); [ROW,COL] = size(img); img = double(img); new_img = zeros(ROW,COL); %新建画布 sobel_x = [-1,0,1;-2,0,2;-1,0,1]; sobel_y = [-1,-2,-1;0,0,0;1,2,1]; for i = 1:ROW - 2 for j = 1:COL - 2 funBox = img(i:i+2,j:j+2); G_x = sobel_x .* funBox; G_x = abs(sum(G_x(:))); G_y = sobel_y .* funBox; G_y = abs(sum(G_y(:))); sobelxy = G_x * 0.5 + G_y * 0.5; %带有截距的锐化(二值化) % if (sobelxy > 150) % sobelxy = 255; % else % sobelxy = 0; % end new_img(i+1,j+1) = sobelxy; end end figure(2); imshow(new_img/255),title("梯度运算的图像");