
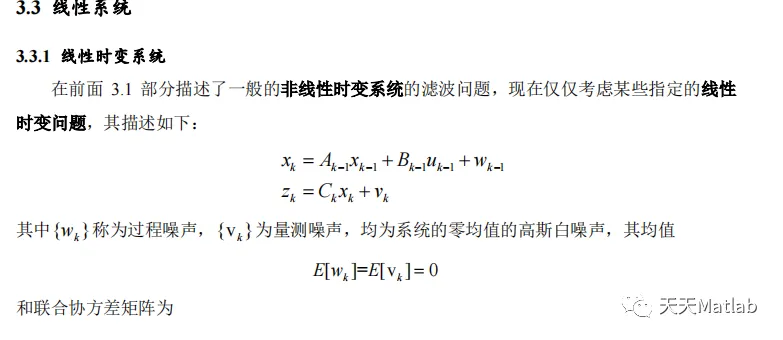
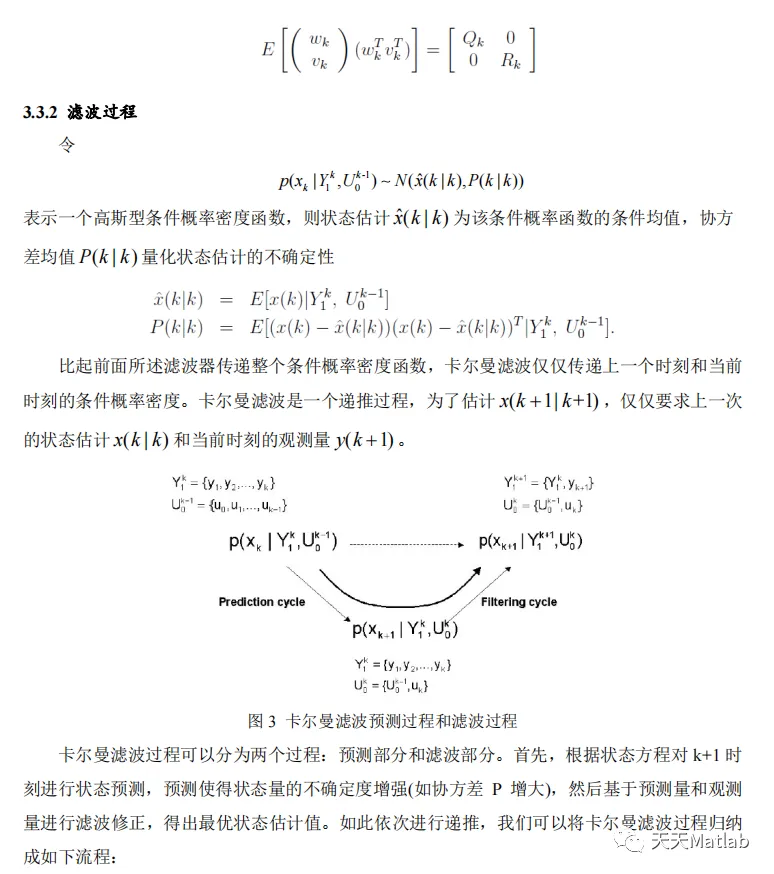
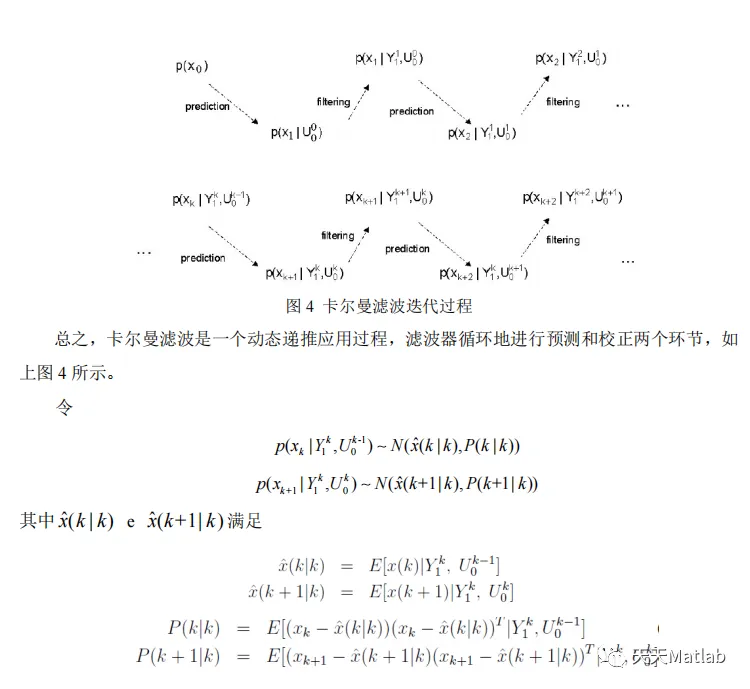
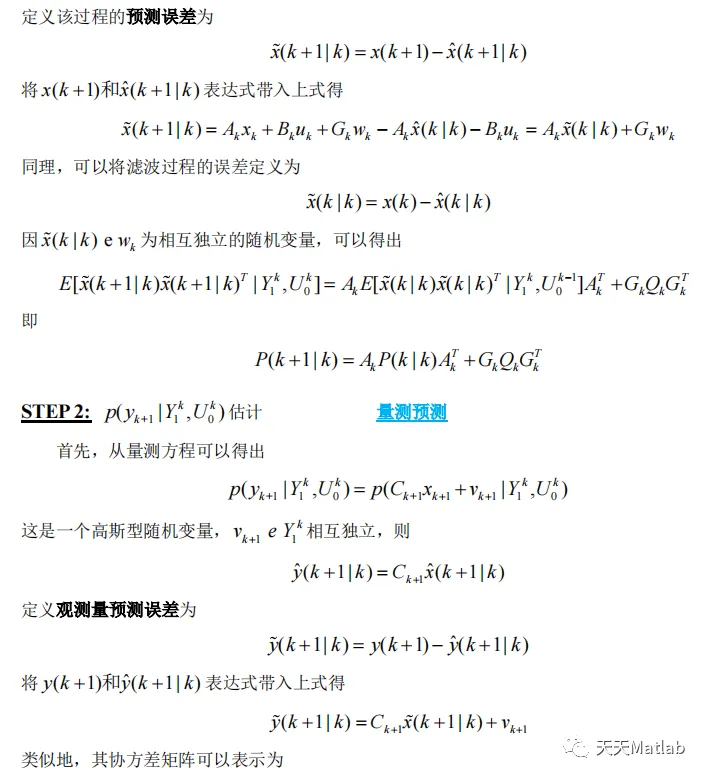
1 内容介绍
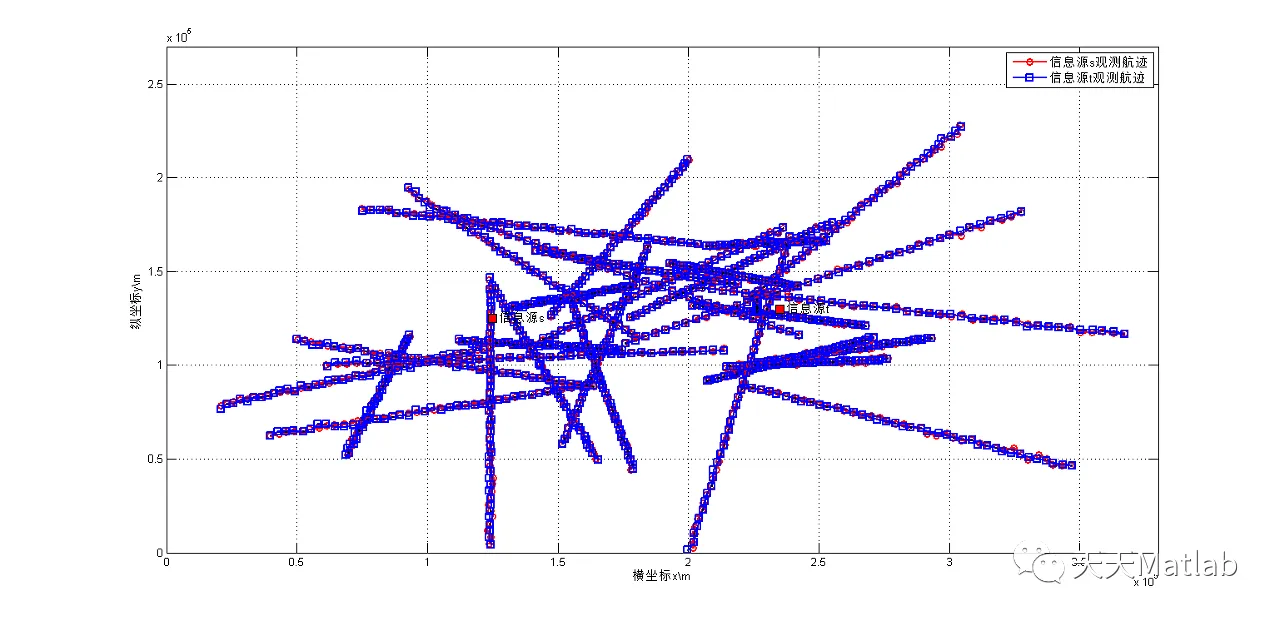
针对船舶自动识别系统(AIS)与高频地波雷达(HFSWR)对海上目标探测的数据,对其目标航迹关联技术进行了研究. 结合最近邻原则与卡尔曼滤波算法,提出了一种最近邻-卡尔曼滤波航迹关联算法.通过仿真验证结果,表明了该航 迹关联算法的有效性与正确性.
2 部分代码
function [s,P]=KF3(s_forward,P_forward,X,T,Q,C,H)
%卡尔曼滤波
%参数说明
% X--观测数据矢量
% A--状态矩阵
% Q--驱动噪声协方差
% C--观测噪声协方差
% h--观测方程句柄
% s--输出数据矢量
% s_foward--前次输出矢量
% M--前次预测矩阵
%状态转换矩阵
AB=[1 T T^2/2 0 0 0;...
0 1 T 0 0 0;...
0 0 1 0 0 0;...
0 0 0 1 T T^2/2;...
0 0 0 0 1 T;...
0 0 0 0 0 1];
A=[1,T,0,0;...
0,1,0,0;...
0,0,1,T;...
0,0,0,1];
%一步过程预测
s=s_forward;
s=A*s;
%最小预测MSE矩阵
P=P_forward;
P=A*P*A'+Q;
%卡尔曼增益矩阵
K=P*H'*inv(C+H*P*H');
%修正过程预测后,即得到滤波值
s=s+K*(X-H*s);
%最小估计MSE矩阵
P=P-K*H*P;
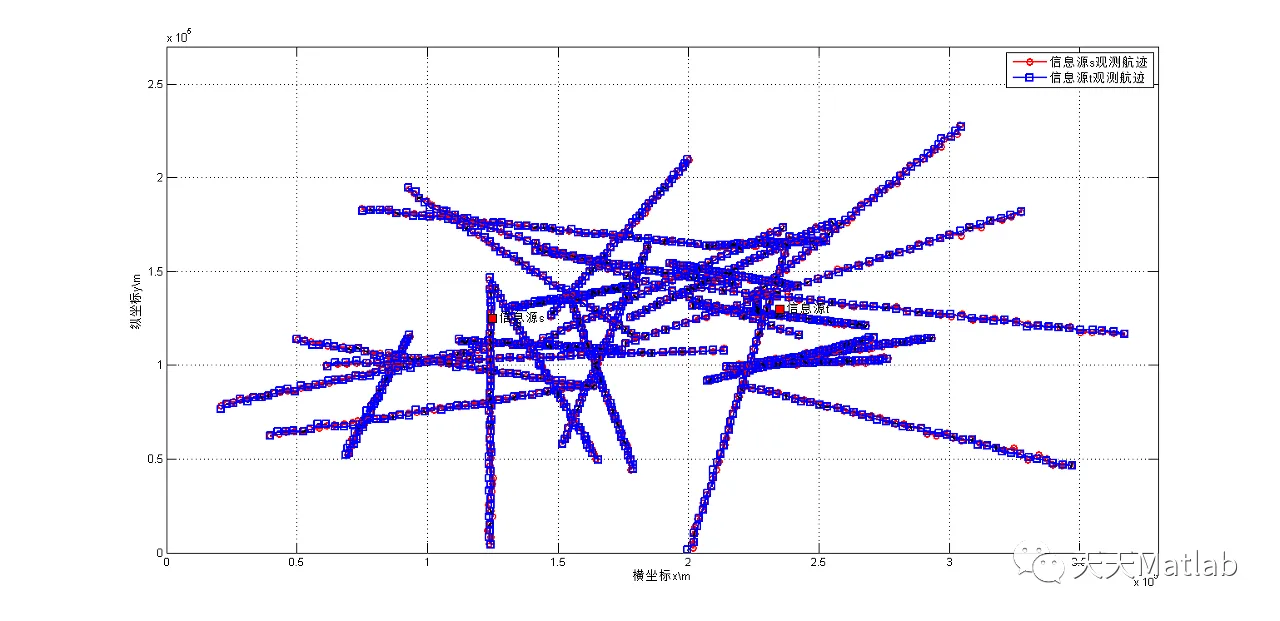
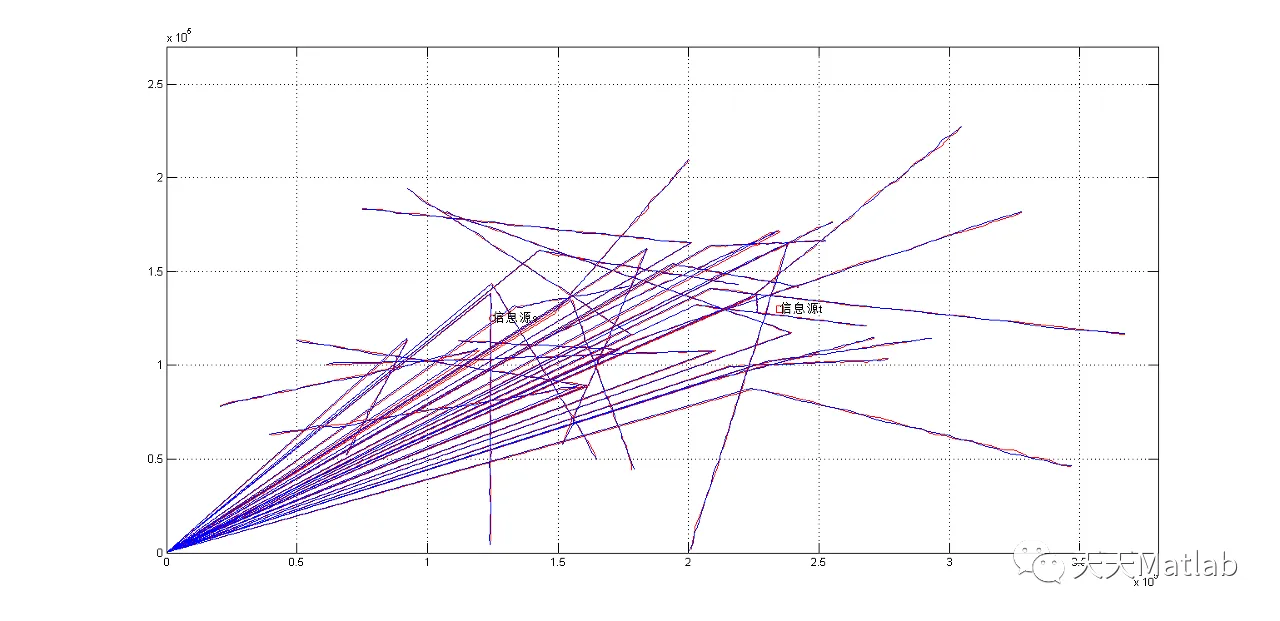
3 运行结果
4 参考文献
[1]Zheng Zhiqiang, 郑志强, Liu Yongxin,等. 基于最近邻-自适应滤波AIS与HFSWR航迹关联算法[C]// 中国航空学会信息融合分会. 中国航空学会信息融合分会, 2015.
