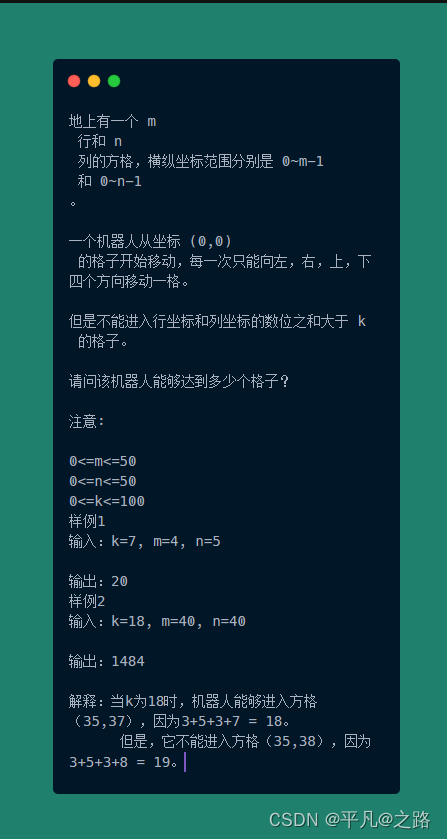
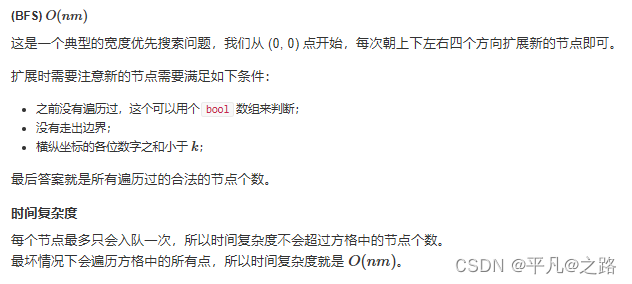
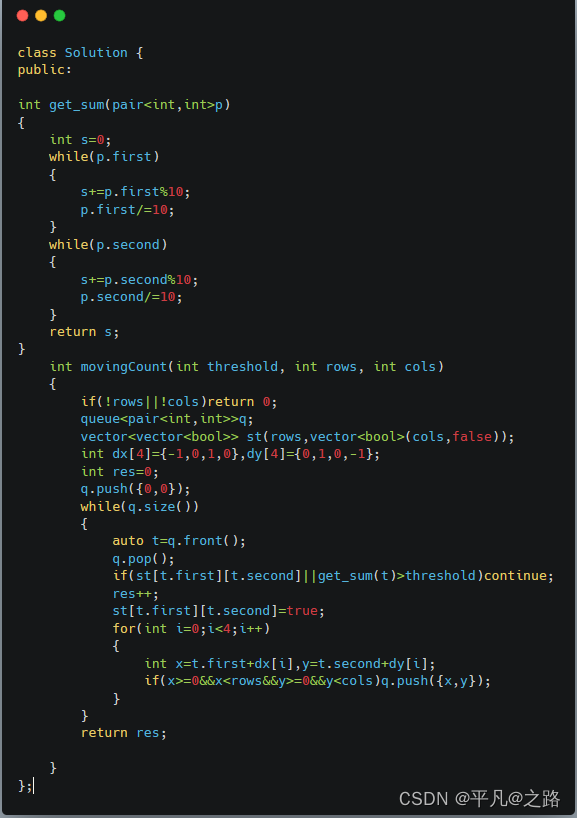
剑指offer-12.机器人的运动范围
2023-09-20
37
版权
版权声明:
本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《
阿里云开发者社区用户服务协议》和
《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写
侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
简介:
剑指offer-12.机器人的运动范围

目录
相关文章
|
4月前
|
机器人
|
4天前
|
机器人
Python
Moveit + Gazebo实现联合仿真:ABB yumi双臂机器人( 二、双臂协同运动实现 )
Moveit + Gazebo实现联合仿真:ABB yumi双臂机器人( 二、双臂协同运动实现 )
14
0
0
|
23天前
|
机器学习/深度学习
人工智能
机器人
[译][AI 机器人] Atlas的电动新时代,不再局限于人类运动范围的动作方式
波士顿动力宣布液压Atlas机器人退役,推出全新电动Atlas,旨在实现更广泛的实际应用。这款全电动机器人将拓展人类运动范围,解决复杂工业挑战。现代汽车公司将参与其商业化进程,作为测试应用场景。波士顿动力计划与创新客户合作,逐步迭代Atlas的应用,打造高效、实用的移动机器人解决方案。Atlas将结合强化学习和计算机视觉等先进技术,通过Orbit软件平台进行管理,未来将在真实世界中发挥超越人类能力的作用。
25
0
0
|
9月前
|
人工智能
算法
机器人
【目标识别】自适应多机器人编队,可在运动和能见度约束下包围和跟踪目标(Matlab代码实现)
【目标识别】自适应多机器人编队,可在运动和能见度约束下包围和跟踪目标(Matlab代码实现)
63
0
0
|
7月前
|
算法
机器人
C++
|
9月前
|
传感器
Ubuntu
机器人

|
9月前
|
传感器
算法
机器人
|
11月前
|
机器人
|
11月前
|
机器人
|
11月前
|
机器人
Java
Python
热门文章
最新文章
1
人工智能的机器人技术为啥那么强,对于未来意味着什么?
2
【UR六轴机械臂源码】python脱离示教器控制UR机械臂实时采集机器人位姿(优傲机器人)
3
AI电销机器人系统源码部署:freeswitch安装Windows
4
在机器人流程自动化(RPA)中,判断网页或元素是否加载完成是一个重要的步骤
5
,出现了一个RPA(机器人流程自动化)的运行异常,具体错误为 `rpa.core.errors.RPATimeoutError`
6
海尔、乐聚联手,发布国内首款家庭服务人形机器人
7
使用TDengine国产时序数据库存储能耗数据并通过钉钉机器人接收报警信息
8
ROS机器人程序设计(原书第2版)2.2.4 消息
9
《机器人爱好者(第3辑)》——为什么早期的机器人开发落后了
10
外媒:中国积极部署工业机器人 2020年跻身世界10强
1
在机器人流程自动化(RPA)中,判断网页或元素是否加载完成是一个重要的步骤
49
2
海尔、乐聚联手,发布国内首款家庭服务人形机器人
35
3
,出现了一个RPA(机器人流程自动化)的运行异常,具体错误为 `rpa.core.errors.RPATimeoutError`
38
4
量化交易策略机器人系统开发|成熟案例|详情方案
55
5
单片机和FreeRTOS上跑机器人ROS的应用
84
6
简单几步,钉钉机器人秒变通义千问对话机器人
895
7
智能咖啡厅助手:人形机器人 +融合大模型,行为驱动的智能咖啡厅机器人
80
8
Sony BRC-300P 三个1/4英寸7型高级CCD传感器一体式标清机器人紧凑型摄像机
24
9
量化交易机器人系统开发稳定版丨海外版丨多语言丨策略成熟丨案例项目丨指南教程
35
10
【RAG实践】基于LlamaIndex和Qwen1.5搭建基于本地知识库的问答机器人
1548