

本节书摘来异步社区《机器人构建实战》一书中的第1章,第1.1节,作者:丘柳东 ,王牛 ,李瑞峰 ,陈阳,更多章节内容可以访问云栖社区“异步社区”公众号查看。
第1章 绪论
机器人构建实战
1.1 机器人的产生与发展
在20世纪工业革命后技术和生产快速发展的背景下,捷克斯洛伐克作家卡雷尔·卡佩克(Karel Capek)根据原意为“劳役、苦工”的古代斯拉夫单词“robota”和原意为“工人”的波兰单词“Robotnik”,造出具有“奴隶机器”含义的新词robot。其含义是一个具有人的外表、特征和功能的机器,是一种人造的劳力。1920年在其剧本《罗萨姆的万能机器人》(Rossum's Universal Robots,R.U.R)中第一次公开使用。
机器人技术的产生和发展,主要源于以下3个方面。
首先,是人类自身发展的必然结果。随着人们探讨、认识、改造自然过程的不断深入,需要一种工具代替人类去从事复杂和繁重的体力劳动,实现人类对不可达世界的认识和改造。
其次,是二战后世界各国经济恢复与发展需求的必然结果。在第二次世界大战之后,由于人力资源缺乏,迫切需要一种工具代替工人进行大批量的生产制造活动,在提高生产效率的同时,降低人的劳动强度,恢复和促进本国经济的发展。
另外,是科学技术综合发展的必然结果。机械、制造、材料、电子,计算机、自动控制以及人工智能等相关理论与技术的发展,促使多学科交叉领域不断被发掘,这些多学科交叉领域需要一个综合载体进行检验与促进。一方面这些相关理论与技术为现代机器人技术的产生和发展提供了强大的保证,另一方面其综合发展水平决定了机器人技术的发展水平。
因此,机器人技术的产生和发展是人类与社会、科技发展的共同需要,对社会经济发展产生了重大影响。机器人技术汇集了众多主流学科的最新研究成果,是当代科学技术发展最活跃的领域之一。学习机器人技术,有利于了解与掌握当今科学技术的研究成果及其应用,适应当代科技与社会发展的需要。
1.1.1 古代机器人技术的萌芽
制造机器人是机器人技术研究者的梦想,代表了人类塑造自身、了解自身的一种强烈愿望。机器人技术虽然出现得比较晚,然而这一概念在人类的想象中却早已出现。自古以来,就有不少科学家和杰出工匠制造出了具有人类或动物特征的机器人雏形。
西周时期,我国的能工巧匠偃师就研制出了能歌善舞的伶人,这是我国最早具有文字记载的自动机械。
春秋后期,据《墨经》记载,我国著名木匠鲁班制造了一只能在空中飞行三日而不下的木鸟,这也是最早进行仿生研究的文字记载。
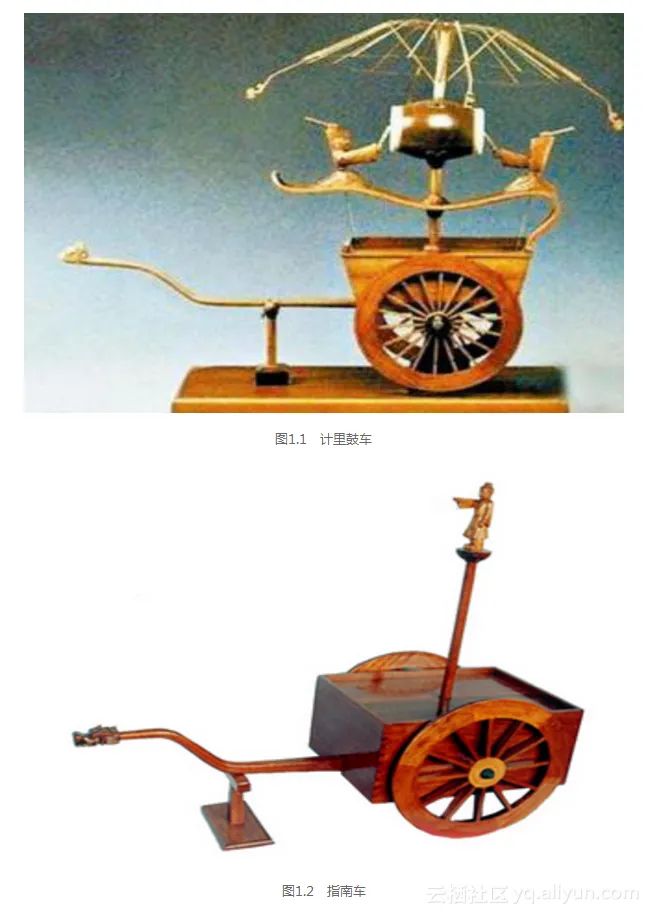
东汉时期,著名科学家张衡发明了地动仪、计里鼓车(见图1.1)和指南车(见图1.2)。记里鼓车每行进500m,车上的木人击鼓一下;每行进5km,击钟一下;具有复杂轮系装置的指南车,若车上木人运动起始指向南方,则该车无论左转右转、上坡下坡,指向始终不变,可谓精巧绝伦。
1662年,日本的竹田近江利用钟表技术发明了自动机器玩偶,并在大阪的道顿崛演出。
1738年,为了实现把生物的功能机械化以进行医学上的分析,法国天才技师瓦克逊发明了一只机器鸭,它会嘎嘎叫,会游泳和喝水,还会进食和排泄。
1768~1774年间,瑞士钟表匠德罗斯父子3人合作制造出3个像真人一样大小的机器人——写字偶人、绘图偶人和弹风琴偶人。它们是靠弹簧驱动、由凸轮控制的自动机器,至今还作为国宝保存在瑞士纳切尔市艺术和历史博物馆内。
由于技术水平的限制,古代的自动机械或装置大多只能依靠机械能(如利用弹性元件进行储存),甚至外部自然能源,无法主动获取外部信息进行自主控制,因此不能算是真正的机器人。
但是古代科学家制造的玩偶至今还有其价值。它为现代玩具制造业和近代机器人提供设计思想,激励科研人员不断提出新理论和新技术。
1.1.2 近代机器人技术的发展
能源是实现自动控制的基础,第二次工业革命后,由于电能的广泛使用,越来越多的自动化/半自动化设备应用到工业生产中。
20世纪50年代以后,美国橡树岭国家实验室(Oak Ridge National Laboratory,ORNL)开始研究能搬运核原料的主从型遥控操纵机械手。系统中加入力反馈,可使操作者获知施加力的大小,操作者可通过观察窗或闭路电视对从机械手操作进行有效的监督。
在此前后,美国的戴沃尔(Ceorge G. Devol)设想了一种可控制的机械手。将数控机床的伺服轴与遥控操纵器的连杆机构连接在一起,预先设定的机械手动作经编程输入后,系统就可以离开人的辅助而独立运行。这种机器人的主要技术功能被称为可编程和示教-再现功能,一直在工业机器人领域沿用至今。
在此期间,一些实用化的机器人相继问世,1959年第一台工业机器人在美国诞生,开创了机器人发展的新纪元。
1.1.3 现代机器人技术的发展
由于工业生产的需求,机器人技术首先在亟需劳动力的工业生产中应用并高速发展。此时的工业机器人以示教-再现方式工作。由人对机器人运动的轨迹、停留位置等进行设置。然后机器人依照设定的行为、顺序和速度重复运动。
随着自动控制技术和传感检测技术的发展,机器人开始安装传感器进行外部环境信息的获取,并通过反馈控制,使机器人能在一定程度上适应变化的环境,使机器人具备了智能性。
将人工智能与智能控制理论应用到机器人后,使得机器人具有了和一般自动化设备进行区分的主要标志。现在的机器人普遍具有多种感知功能,能够进行复杂的逻辑推理、判断及决策,具有发现问题且能自主地解决问题的能力。
机器人技术的发展水平也成为一个国家科技能力的重要评价指标。许多国家成立了机器人协会,相关的国际学术交流活动也日渐增多。不少知名大学也相继开设了机器人课程,开展机器人学的研究工作,并设立了机器人学学位。

