(2)关于上一篇博文中提到的欧几里德分割法称之为标准的距离分离,当然接下来介绍其他的与之相关的延伸出来的聚类的方法,我称之为条件欧几里德聚类法,(是我的个人理解),这个条件的设置是可以由我们自定义的,因为除了距离检查,聚类的点还需要满足一个特殊的自定义的要求,就是以第一个点为标准作为种子点,候选其周边的点作为它的对比或者比较的对象,如果满足条件就加入到聚类的对象中,至于到底怎么翻译我也蒙了,只能这样理解了
主要的缺点:该算法没有初始化种子系统,没有过度分割或者分割不足的控制,还有就是从主循环运算中调用条件函数时,效率比较低,
看一下代码吧,至于到底怎么理解各个有个人的理解吧
#include <pcl/io/pcd_io.h> #include <pcl/segmentation/conditional_euclidean_clustering.h> #include <iostream> //如果此函数返回true,则将添加候选点到种子点的簇类中。 bool customCondition(const pcl::PointXYZ& seedPoint, const pcl::PointXYZ& candidatePoint, float squaredDistance) { // 在这里你可以添加你自定义的条件 if (candidatePoint.y < seedPoint.y) return false; return true; } int main(int argc, char** argv) { pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) != 0) { return -1; } // 申明一个条件聚类的对象 pcl::ConditionalEuclideanClustering<pcl::PointXYZ> clustering; clustering.setClusterTolerance(0.02); clustering.setMinClusterSize(100); clustering.setMaxClusterSize(25000); clustering.setInputCloud(cloud); // 设置要检查每对点的函数。 clustering.setConditionFunction(&customCondition); std::vector<pcl::PointIndices> clusters; clustering.segment(clusters); // 对于每一个聚类结果 int currentClusterNum = 1; for (std::vector<pcl::PointIndices>::const_iterator i = clusters.begin(); i != clusters.end(); ++i) { // ...add all its points to a new cloud... pcl::PointCloud<pcl::PointXYZ>::Ptr cluster(new pcl::PointCloud<pcl::PointXYZ>); for (std::vector<int>::const_iterator point = i->indices.begin(); point != i->indices.end(); point++) cluster->points.push_back(cloud->points[*point]); cluster->width = cluster->points.size(); cluster->height = 1; cluster->is_dense = true; // ...and save it to disk. if (cluster->points.size() <= 0) break; std::cout << "Cluster " << currentClusterNum << " has " << cluster->points.size() << " points." << std::endl; std::string fileName = "cluster" + boost::to_string(currentClusterNum) + ".pcd"; pcl::io::savePCDFileASCII(fileName, *cluster); currentClusterNum++; } }
上面执行的条件是检查候选点的Y坐标是否小于种子的Y坐标,没有什么实际意义。所以我就再查看结果了。
那么同时我暂时也用不到,如果有想法的时候再回来研究吧
(2)最小分割算法
该算法是将一幅点云图像分割为两部分:前景点云(目标物体)和背景物体(剩余部分)
关于该算法的论文的地址:http://gfx.cs.princeton.edu/pubs/Golovinskiy_2009_MBS/paper_small.pdf
The Min-Cut (minimum cut) algorithm最小割算法是图论中的一个概念,其作用是以某种方式,将两个点分开,当然这两个点中间可能是通过无数的点再相连的。如图
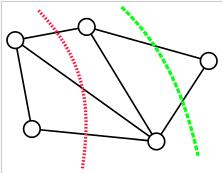
如果要分开最左边的点和最右边的点,红绿两种割法都是可行的,但是红线跨过了三条线,绿线只跨过了两条。单从跨线数量上来论可以得出绿线这种切割方法更优 的结论。但假设线上有不同的权值,那么最优切割则和权值有关了。当你给出了点之间的 “图” ,以及连线的权值时,最小割算法就能按照要求把图分开。
所以那么怎么来理解点云的图呢?
显而易见,切割有两个非常重要的因素,第一个是获得点与点之间的拓扑关系,这种拓扑关系就是生成一张 “图”。第二个是给图中的连线赋予合适的权值。只要这两个要素合适,最小割算法就会正确的分割出想要的结果。点云是分开的点。只要把点云中所有的点连起来就可以了。连接算法如下:
- 找到每个点临近的n个点
- 将这n个点和父点连接
- 找到距离最小的两个块(A块中某点与B块中某点距离最小),并连接
- 重复3,直至只剩一个块
经过上面的步骤现在已经有了点云的“图”,只要给图附上合适的权值,就满足了最小分割的前提条件。物体分割比如图像分割给人一个直观印象就是属于该物体的点,应该相互之间不会太远。也就是说,可以用点与点之间的欧式距离来构造权值。所有线的权值可映射为线长的函数。

我们知道这种分割是需要指定对象的,也就是我们指定聚类的中心点(center)以及聚类的半径(radius),当然我们指定了中心点和聚类的半径,那么就要被保护起来,保护的方法就是增加它的权值

接下来我们就来看看代码
#include <pcl/io/pcd_io.h> #include <pcl/search/kdtree.h> #include <pcl/features/normal_3d.h> #include <pcl/segmentation/region_growing.h> #include <pcl/segmentation/min_cut_segmentation.h> #include <iostream> #include <pcl/segmentation/region_growing_rgb.h> int main(int argc, char** argv) { //申明点云的类型 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); // 法线 pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>); if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) != 0) { return -1; } // 申明一个Min-cut的聚类对象 pcl::MinCutSegmentation<pcl::PointXYZ> clustering; clustering.setInputCloud(cloud); //设置输入 //创建一个点云,列出所知道的所有属于对象的点 // (前景点)在这里设置聚类对象的中心点(想想是不是可以可以使用鼠标直接选择聚类中心点的方法呢?) pcl::PointCloud<pcl::PointXYZ>::Ptr foregroundPoints(new pcl::PointCloud<pcl::PointXYZ>()); pcl::PointXYZ point; point.x = 100.0; point.y = 100.0; point.z = 100.0; foregroundPoints->points.push_back(point); clustering.setForegroundPoints(foregroundPoints); //设置聚类对象的前景点 //设置sigma,它影响计算平滑度的成本。它的设置取决于点云之间的间隔(分辨率) clustering.setSigma(0.02); // 设置聚类对象的半径. clustering.setRadius(0.01); //设置需要搜索的临近点的个数,增加这个也就是要增加边界处图的个数 clustering.setNumberOfNeighbours(20); //设置前景点的权重(也就是排除在聚类对象中的点,它是点云之间线的权重,) clustering.setSourceWeight(0.6); std::vector <pcl::PointIndices> clusters; clustering.extract(clusters); std::cout << "Maximum flow is " << clustering.getMaxFlow() << "." << std::endl; int currentClusterNum = 1; for (std::vector<pcl::PointIndices>::const_iterator i = clusters.begin(); i != clusters.end(); ++i) { //设置聚类后点云的属性 pcl::PointCloud<pcl::PointXYZ>::Ptr cluster(new pcl::PointCloud<pcl::PointXYZ>); for (std::vector<int>::const_iterator point = i->indices.begin(); point != i->indices.end(); point++) cluster->points.push_back(cloud->points[*point]); cluster->width = cluster->points.size(); cluster->height = 1; cluster->is_dense = true; //保存聚类的结果 if (cluster->points.size() <= 0) break; std::cout << "Cluster " << currentClusterNum << " has " << cluster->points.size() << " points." << std::endl; std::string fileName = "cluster" + boost::to_string(currentClusterNum) + ".pcd"; pcl::io::savePCDFileASCII(fileName, *cluster); currentClusterNum++; } }
看一下实际运行的最小分割法的结果

原始的点云
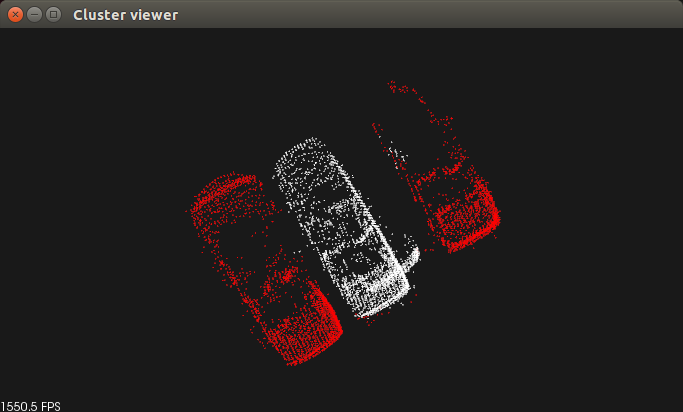
最小分割法的结果
对于实际应用中我们应该设置正确的参数这是最为关键的!