由于一直在调试本项目,好久没有发文章,最近本项目的PID调试初见成效!开始正文前首先感谢各位粉丝的支持,以及对本项目技术上支持的老师以及师兄,谢谢你们!
对应源码及文件:源码及文件下载
基于stm32的多旋翼无人机
一、多旋翼无人机飞行原理
四轴飞行器基本原理是通过飞控控制四个电机旋转带动浆叶产生升力,分别控制每一个电机和浆叶产生不同的升力从而控制飞行器的姿态和位置。四轴在空中可以实现八种运动,分别为垂直上升、垂直下降、向前运动、向后运动、向左运动、向后运动、顺时针改变航向、逆时针改变航向。
1.1 多旋翼无人机的组成
四轴飞行器主要是由电机、电调、电池、浆叶、机架、遥控器、飞控组成。下面以我们四轴及市场上常见的 DIY 大四轴来介绍这些部件。
1.1.1 电机
电机根据目前市场的供给以及本项目的需求,采用的是空心杯无刷电机8520,如下图:

其转速可达到12000~15000转/min,并且其价格较低,性能较稳定,更适合本项目的使用。
1.1.2 电调
电调即为电子调速器,控制电机转动、停止及转速。有刷电机电调通常只需要一个 MOS 管,飞控输出 PWM 即可控制电机,电调所采用的MOS管如下图所示:无刷电机电调模块内部通常由一个 MCU 和三相桥电路组成,MCU 通过控制三相桥来实现无刷电机换相。同样,无刷电机电调模块也只需飞控输出 PWM 即可控制电机

1.1.3 航模电池
航模所用电池为3.7v锂电池(可充电),由于受到多旋翼无人机自身动力的问题,故采用800mh锂电池来供电,遥控器也采用800mh供电,飞行时间大概20min左右。电池如下图:

电池插座采用空对空接头。
电池容量 mAh:锂电池的容量,如 2000mAh 的电池,以 2000mA 放电,可持续放电 1
小时;以 1000mA 放电,可持续放电 2 小时。
电池节数:电池 2S、3S、4S 代表锂电池节数。锂电池 1 节的标准电压为 3.7V,3S 代
表有 3 节 3.7V 的电池在里面,电压为 11.1V。
1.1.4 正反浆
浆液采用的是75mm直径的正反浆,如下图所示:

浆叶旋转时会产生自旋力导致四轴自旋,为了抵消自旋力相隔电机的浆叶旋转方向要不一样,但是浆的风都是要往下吹,这就出现了正反浆的说法。通常顺时针转的叫正浆,逆时针转的是反浆。
1.2 垂直上升及下降
当四轴飞行在空中自稳后,M1、M2、M3、M4 四个电机同时转速增大或同时转速减小,即可发生垂直上升运动或垂直下降运动,如下图所示:

1.3 向前飞行及向后飞行
当四轴飞行在空中自稳后,M2、M3 转速增大 M1、M4 转速不变或减小即可实现向前运动。相反,M2、M3 转速减小或不变 M1、M4 转速增加,即可实现向后运动,如下图所示:

向左和向右飞行同理可以实现,这里就不做介绍。
1.4 顺时针改变航向和逆时针改变航向
当四轴飞行在空中自稳后,M1、M3 转速增大 M2、M4 转速不变或减小即可实现顺时针改变航向。M1、M3 转速减小或不变 M2、M4 转速增加即可实现逆时针改变航向。如下图所示:

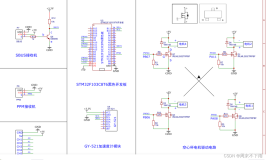
二、多旋翼无人机飞控电路设计
2.1 系统框架设计

根据Minfly的系统框架图,来进行设计,主控芯片采用STM32103C8T6,三轴陀螺仪采用MPU6050芯片,收发无线模块采用NRFL2401模块(亿百特)等。
2.2 主控MCU模块
主控采用的是STM32103C8T6芯片,电路图如下:

主控 MCU 为四轴飞行器的大脑,对飞行器稳定飞行起着至关重要的作用。它同时承担
着多种责任,包括:传感器数据读取、数据融合、PID 控制、电机控制、无线通信和 USB
通信等。
主控 MCU 连接了一个 USB 接口,此接口可以用作与上位机通信,也可以用作固件升级,是一个非常方便适用的接口。
2.3 三轴加速陀螺仪模块
三轴加速陀螺仪模块采用的是MPU6050芯片作为主控,MPU6050 IMU 在单芯片上集成了一个 3 轴加速度计和一个 3 轴陀螺仪。以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor)。它也被称为六轴运动跟踪设备或 6 DoF 设备,因为它有 6 个输出,即 3 个加速度计输出和 3 个陀螺仪输出。以当前地面为水平面检测x,y,z三轴方向上的加速度,并转换为电信号来进行输出。同时进行三轴陀螺仪传感器进行使用,得到三轴方向上的倾角,即姿态角。如下图所示:

MPU6050主控芯片的控制原理如图:

设计电路图如下:

2.4 电机驱动模块
本项目采用微型高速 8520空心杯电机,电机转速高达 15000r/min,能够为飞行器提供充沛的动力。电机采用 NMOS 管 SI2302,3V 门级驱动电压下,导通电阻只有几十毫欧,驱动电流高达 3A,轻松驱动 8520空心杯电机,从而带动飞行器飞行。电路设计如下图:

2.5 无线通信模块
无线通信模块所采用的是NRF24L01模块来进行通信,NRF24L01是一款新型单片射频收发器件,工作与2.4GHz~2.5GHz ISM频段。内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,并融合了增强型ShockBurst技术,其中输出功率和通信频道可通过程序进行配置。
nRF24L01有工作模式有四种:
- 收发模式
- 配置模式
- 空闲模式
- 关机模式
如图所示(E01-ML01S):

芯片方案:nRF24L01P
工作频率:2.4~2.525GHz
发射功率:0dBm
通信距离:0.1km
接口类型:SPI
产品重量:0.5±0.1g
产品简介:采用挪威NorDic公司原装进口nRF24L01P射频芯片,收发 一体;全进口工业级元器件,邮票孔贴片型,内置PCB板载天线;体积小易嵌入,性能优异,数据传输快,适合近距离传输。
要实现通信还需要E01-ML01D模块来实现交互通信,模块的图片如下:

芯片方案:nRF24L01P
工作频率:2.4~2.525GHz
发射功率:0dBm
通信距离:0.1km
通信接口:SPI
产品重量:0.9±0.1g
产品简介:挪威进口nRF24L01+芯片,日本进口阻容感,美国进口晶振,无铅焊接工艺; 目前已经大量用于电力线,品质相当可靠,使用寿命长。
无线通信模块电路图如下:(分别为接受端和发送端)


2.6 升压、稳压电路模块
考虑本项目所需8520电机供电为3.7v,而本项目还需要5v供电,电池的供电为3.7v,因此需要设计升压电路来进行从3.7v到5v的升压,根据模拟电子技术以及电路原理自主设计了3.7v----5v的升压电路。主控为DC–DC电源芯片,采用肖特基二极管来进行外部稳压,具体电路如下图所示:(篇幅影响不进行详细的讲解,感兴趣的粉们可以私信我讨论相关知识)

最终得到5v的升压电源,方便项目其他模块的供电。
相反可以设计出稳压电路从5v—3.3v的降压电路,具体原理不做说明,具体见下图所示:

2.7 LED电路模块
此部分为LED指示灯电路设计,主要由3个LED直插式灯以及两枚RGB贴片灯组成,具体i单路如下图所示:

后续逻辑功能将在程序中进行设计。
三、多旋翼无人机飞控算法设计
3.1 飞行姿态表示法
飞行器姿态有多种表示方式,常见的是四元数,欧拉角,矩阵和轴角。他们各自有其自身的优点,在不同的领域使用不同的表示方式。在四轴飞行器中使用到了四元数和欧拉角。
3.1.1 欧拉角
用来确定定点转动刚体位置的 3 个一组独立角参量,由章动角 θ、旋进角(即进动角)ψ 和自转角 j 组成,为莱昂哈德·欧拉首先提出而得名。对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。参考系又称为实验室参考系,是静止不动的。而坐标系则固定于刚体,随着刚体的旋转而旋转。
如下图所示:

设定 xyz-轴为参考系的参考轴。称 xy-平面与 XY-平面的相交为交点
线,用英文字母(N)代表。
zxz 顺规的欧拉角可以静态地这样定义:
α 是 x-轴与交点线的夹角,β 是 z-轴与 Z-轴的夹角,γ 是交点线与 X-轴的夹角。
基于stm32的多旋翼无人机(Multi-rotor UAV based on stm32)(中)+https://developer.aliyun.com/article/1627391