前言
c++两个比较好的协程库libgo和libco,本文用纯c的代码实现一个协程ntyco。
ntyco源码地址——> gopherWxf/NtyCo——>源码里面有注释,本文是对ntyco的整体做一个梳理。
如果了解过golang的协程的请注意,golang调度器的策略见→ 深入理解GMP模型 ,golang的协程与ntyco的协程不一样,ntyco的调度策略是基于 io事件 来做的。
协程用在以下三个方面
1. 文件io的操作 2. 网络io的操作 3. mysql,redis等第三方库的操作
本专栏知识点是通过零声教育的线上课学习,进行梳理总结写下文章,对c/c++linux课程感兴趣的读者,可以点击链接 C/C++后台高级服务器课程介绍 详细查看课程的服务。
1. 为什么会有协程,协程解决了什么问题?
网络IO优化
在CS,BS的开发模式下,服务器的吞吐量是一个受关注的参数。吞吐量等于1秒内业务处理的次数,那么这个业务处理其实是由 网络IO时间 + 业务处理时间 组成的。
不同的业务,其业务处理时间是不同的,所以对于业务处理时间的优化,要根据业务场景来优化。而网络IO时间是可以优化的。
也就是说,如何提升recv和send的性能?现在以Linux服务器百万并发实现为例,使用epoll管理百万长连接,测试IO同步操作与异步操作的性能差别。
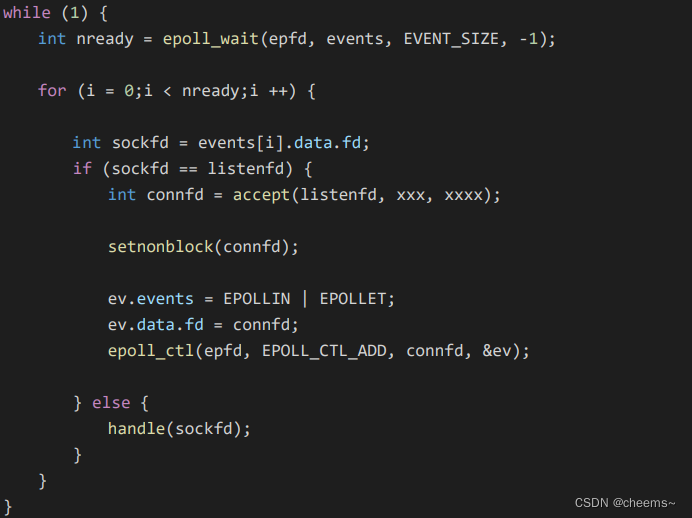
对于响应式服务器来说,所有客户端的操作都是源于这个大循环,对于服务器处理网络IO,handle(sockfd) 的实现有两种方式。第一种,IO同步;第二种,IO异步。
IO 同步 操作性能测试
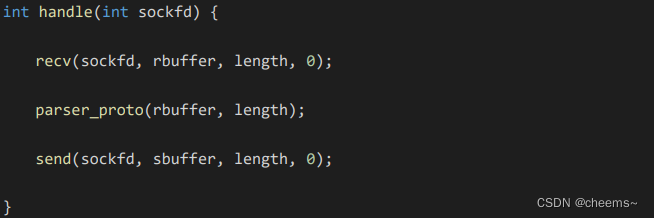
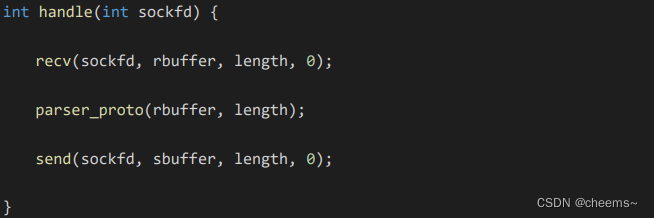
对于IO 同步操作来说,handle(sockfd) 函数内部实现如下,我们发现IO操作(recv,send)与 epoll_wait 是在同一个处理流程里面的。也就是说,同步:检测IO 与 读写IO 在同一个流程里
Linux服务器百万并发实现就是以同步的方式做的,我们测试出来,每一千个连接,耗时7.5秒左右。

优点:
- sockfd 管理方便
- 代码逻辑清晰
缺点:
- 服务器程序依赖 epoll_wait 的循环,响应速度慢。
- 程序性能差
IO 异步 操作性能测试
对于IO 异步操作来说,handle(sockfd) 函数内部将 sockfd 的操作,push 到线程池中 , 由其他线程进行读写,也就是说,异步:检测IO 与 读写IO 不在同一个流程里。
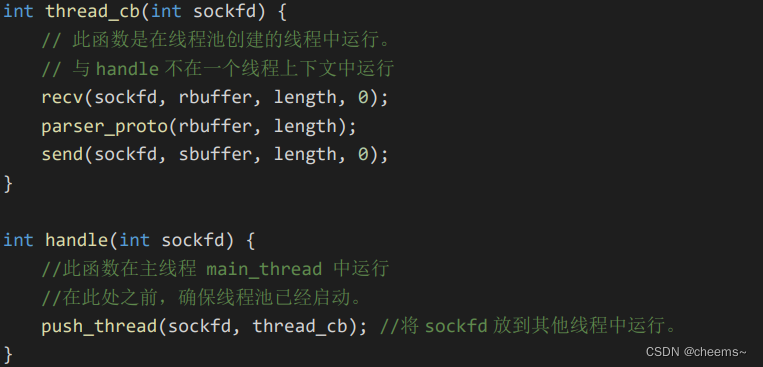
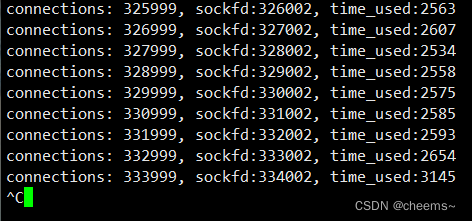
handle(sockfd) 函数将sockfd处理放到另一个线程中处理,使得IO操作(recv,send) 与 epoll_wait 不在一个处理流程里面,实现了解耦,这就叫做IO 异步操作。可以看到下图,每一千个连接耗时2.5秒左右。
优点:
- 子模块好规划
- 程序性能高
缺点:
- 正因为子模块好规划,使得模块之间的 sockfd 的管理异常麻烦。每一个子线程都需要管理好 sockfd,避免在 IO 操作的时候,sockfd 出现关闭或其他异常。通俗来讲,需要避免一个fd被多个线程操作的情况发生。
协程的诞生
| 对比项 | IO 同步操作 | IO 异步操作 | 协程 |
| Sockfd 管理 | 管理方便 | 多个线程共同管理 | 管理方便 |
| 代码逻辑 | 程序整体逻辑清晰 | 子模块逻辑清晰 | 程序整体逻辑清晰 |
| 程序性能 | 响应时间长,性能差 | 响应时间短,性能好 | 响应时间短,性能好 |
从上面我们知道了IO同步操作,写代码逻辑清晰,但是效率低;而IO异步操作,fd管理复杂,但是效率高。由此,协程便出现了。
协程:把两者结合起来,以同步的编程方式,实现异步的性能。即写代码的时候,同步;运行的逻辑,异步。就如下图一样,代码是同步的,而我们通过hook,其运行的时候,就是异步的。
可能有人会说了,上面IO异步操作性能测试明明是用了两个线程,当然比一个线程的同步IO快。首先明确一个概念:同步和异步,一定是描述两者之间的关系:
同步:检测IO 与 读写IO 在同一个流程里
异步:检测IO 与 读写IO 不在同一个流程里
然后再来理解下面的QA问题,注意需要在理解本文协程的时候才能看懂,到时候回过头再看即可。
Q:为什么协程的效率会更高?单线程reactor用的是epoll_wait, 协程调度也是epoll_wait,从整体上来看不是一样吗?
A:在没有加入业务解析的情况下,协程性能与单线程reactor是差不多的 ,但是编程会容易很多。首先,用协程业务代码会比较简单,一个协程对应一个fd,业务逻辑都在协程内部;而reactor提供的recv_cb和send_cb是所有业务流程的。
Q:有了业务解析,效率不也一样吗?
A:业务部分,比如数据库操作的,是比较耗时的阻塞IO,而协程可以通过hook,把recv和send变成异步,把数据库IO阻塞的时间,切换到别的协程上运行,所有阻塞等待的地方,都会引起切换。而同步reactor在业务部分数据库IO就只能干等着。
Q:为什么会有协程,协程解决了什么问题?
A:IO同步操作,写代码逻辑清晰,但是效率低;而IO异步操作,fd管理复杂,但是效率高。协程解决了IO同步效率低,IO异步fd管理发杂的问题,协程结合两者的优点,实现了以同步的编程方式,实现异步的性能。
2. 原语
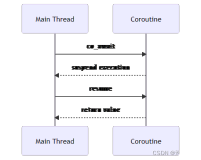
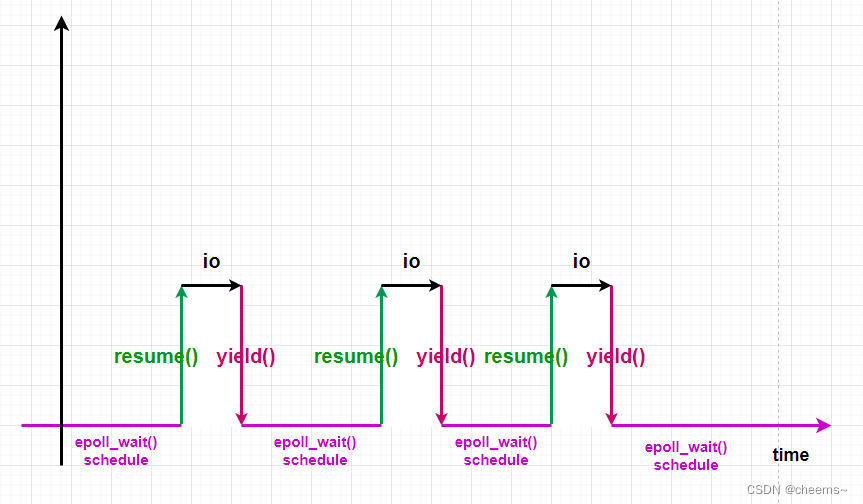
yield()
先来理解yield的含义,让出,将当前的执行流程让出,让出给调度器。
那么什么时候需要yield让出呢?很明显在recv之前,send之前,也就是在io之前,因为我们不知道io是否准备就绪了,所以我们先将fd加入epoll中,然后yield让出,将执行流程给调度器运行。
schedule
schedule调度器做什么事情呢?调度器就是io检测,调度器就是不断的调用epoll_wait,来检测哪些fd准备就绪了,然后就恢复相应fd的执行流程执行现场。注意schedule不是原语,schedule是调度器。
resume()
从上面我们得知恢复是被schedule恢复的,那么现在恢复到了原来流程的哪里呢?其实是恢复到了yield的下一条代码处。通常下面的代码都会将fd从epoll中移除,然后执行recv或send操作,因为一旦被resume,就说明肯定是准备就绪的。
代码+图 进行理解
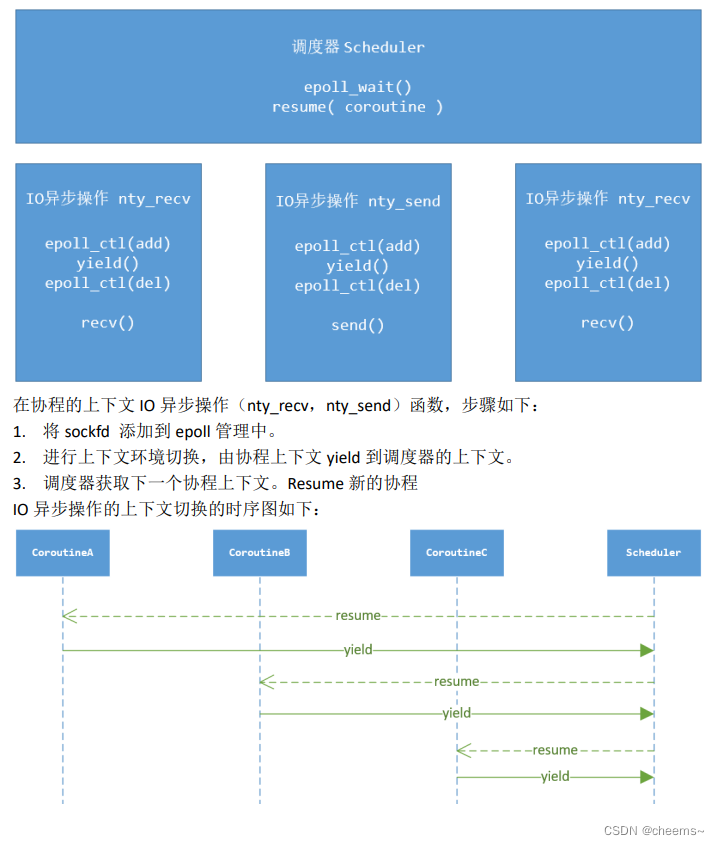
那么如何以同步的编程方式来实现异步的性能呢?我们是否可以包装一层recv(不包装用hook也可以,后面再写hook),在调用recv之前(假设现在的流程为A),将fd加入epoll中,然后将执行流程让出切换给一个调度器(假设调度器的流程为schedule),调度器里面执行epoll_wait,由调度器选择接下来恢复执行哪个流程(这个流程一定是就绪的,因为是从epoll_wait中返回的),可能会恢复到流程B中,那么流程B先将自己的事件从epoll中摘除EPOLL_CTL_DEL,然后就可以执行recv了。我们发现检测IO 与 读写IO 不在同一个流程里,实现了异步,而我们代码看起来却是同步的。
我们从中发现两个原语操作,让出yield和恢复resume

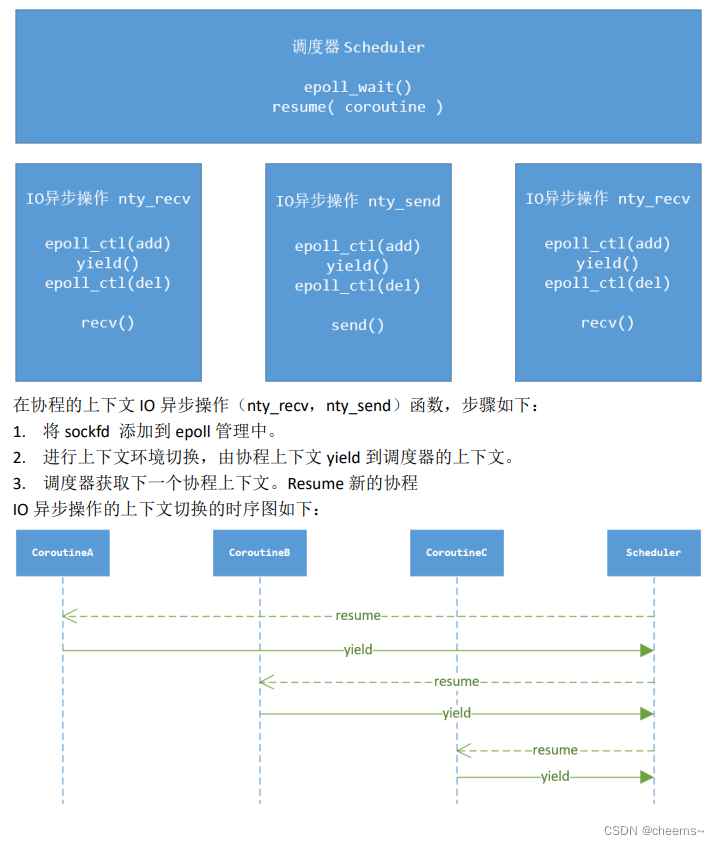
如何实现yield和resume
- yield:从io操作流程切换到调度器流程(让出)
- resume:从调度器流程切换到io操作流程(恢复)
到现在为止应该能理解yield和resume的意思了,但是对于初学者来说,肯定会有疑问,这个切换怎么实现?
如何实现yield和resume:
- setjmp/longjmp
- ucontext
- 用汇编代码自己实现切换
本文采用汇编代码实现切换_switch()。
- yield=_switch(A,B)
- resume=_switch(B,A)
//new_ctx[%rdi]:即将运行协程的上下文寄存器列表; cur_ctx[%rsi]:正在运行协程的上下文寄存器列表 int _switch(nty_cpu_ctx *new_ctx, nty_cpu_ctx *cur_ctx); // yield让出 void nty_coroutine_yield(nty_coroutine *co) { _switch(&co->sched->ctx, &co->ctx); } // resume协程恢复执行 int nty_coroutine_resume(nty_coroutine *co) { //... nty_schedule * sched = nty_coroutine_get_sched(); sched->curr_thread = co; _switch(&co->ctx, &co->sched->ctx); //... }
如何从一个协程切换到另一个协程呢?我们只需要将当前协程的上下文从寄存器组中保存下来;将下一个要运行的协程的上下文放到寄存器组上去,即可实现协程的切换。

3. 切换
寄存器介绍
下面介绍的都是x86_64的寄存器。
- %rdi,%rsi,%rdx,%rcx,%r8,%r9 用作函数参数,依次对应第1参数,第2参数…(这里我们只需关注%rdi和%rsi)
- %rbx,%rbp,%r12,%r13,%14,%15 用作数据存储,遵循被调用者使用规则,简单说就是随便用,调用子函数之前要备份它,以防他被修改
- new_ctx是一个指针,指向一块内存,它现在存在%rid里面,同理cur_ctx存在%rsi里面
- %rsp代表栈顶,%rbp代表栈底,%eip代表cpu下一条待取指令的地址(这也就是为什么resume之后会接着运行代码流程的原因)
//new_ctx[%rdi]:即将运行协程的上下文寄存器列表; cur_ctx[%rsi]:正在运行协程的上下文寄存器列表 int _switch(nty_cpu_ctx *new_ctx, nty_cpu_ctx *cur_ctx);
汇编实现切换
//寄存器 cpu上下文 typedef struct _nty_cpu_ctx { void *rsp;//栈顶 void *rbp;//栈底 void *eip;//CPU通过EIP寄存器读取即将要执行的指令 void *edi; void *esi; void *rbx; void *r1; void *r2; void *r3; void *r4; void *r5; } nty_cpu_ctx; //new_ctx[%rdi]:即将运行协程的上下文寄存器列表; cur_ctx[%rsi]:正在运行协程的上下文寄存器列表 int _switch(nty_cpu_ctx *new_ctx, nty_cpu_ctx *cur_ctx); //默认x86_64 __asm__( " .text \n" " .p2align 4,,15 \n" ".globl _switch \n" ".globl __switch \n" "_switch: \n" "__switch: \n" " movq %rsp, 0(%rsi) # save stack_pointer \n" " movq %rbp, 8(%rsi) # save frame_pointer \n" " movq (%rsp), %rax # save insn_pointer \n" " movq %rax, 16(%rsi) # save eip \n" " movq %rbx, 24(%rsi) # save rbx,r12-r15 \n" " movq %r12, 32(%rsi) \n" " movq %r13, 40(%rsi) \n" " movq %r14, 48(%rsi) \n" " movq %r15, 56(%rsi) \n" " movq 56(%rdi), %r15 \n" " movq 48(%rdi), %r14 \n" " movq 40(%rdi), %r13 \n" " movq 32(%rdi), %r12 \n" " movq 24(%rdi), %rbx # restore rbx,r12-r15 \n" " movq 8(%rdi), %rbp # restore frame_pointer \n" " movq 0(%rdi), %rsp # restore stack_pointer \n" " movq 16(%rdi), %rax # restore insn_pointer \n" " movq %rax, (%rsp) # restore eip \n" " ret # 出栈,回到栈指针,执行eip指向的指令。\n" );
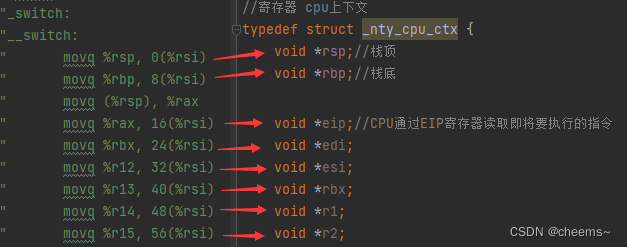
上下文切换,就是将 CPU 的寄存器暂时保存,再将即将运行的协程的上下文寄存器,分别mov 到相对应的寄存器上。此时上下文完成切换。

4. 协程的运行流程
协程如何使用,协程的api
在网络IO编程的时候,如果每次accept返回的时候,为新来的fd单独分配一个线程,这一个fd对应一个线程,就不会存在多个线程共用一个fd的问题了,虽然这样代码逻辑清晰易读,但是这是无稽之谈,线程创建与线程调度的代价是很大的

但是如果把线程换成协程,线程API的思维来使用协程,那不久可行了吗?
NtyCo封装了两类接口
- 一类是协程本身的api
//创建协程 int nty_coroutine_create(nty_coroutine **new_co, proc_coroutine func, void *arg); //调度器运行 void nty_schedule_run(void);
- 一类是posix api的异步封装协程api
//POSIX 异步封装 API int nty_socket(int domain, int type, int protocol); int nty_accept(int fd, struct sockaddr *addr, socklen_t *len); ssize_t nty_recv(int fd, void *buf, size_t len, int flags); ssize_t nty_send(int fd, const void *buf, size_t len, int flags); int nty_close(int fd); int nty_connect(int fd, struct sockaddr *name, socklen_t len); ssize_t nty_recvfrom(int fd, void *buf, size_t len, int flags, struct sockaddr *src_addr, socklen_t *addrlen); ssize_t nty_sendto(int fd, const void *buf, size_t len, int flags, const struct sockaddr *dest_addr, socklen_t addrlen);
协程工作流程
创建协程
创建协程的时候,进行了如何的工作?
int nty_coroutine_create(nty_coroutine **new_co, proc_coroutine func, void *arg);
- nty_coroutine **new_co :需要传入空的协程的对象,这个对象是由内部创建的,并且在函数返回的时候,会返回一个内部创建的协程对象。
- proc_coroutine func :协程的子过程。当协程被调度的时候,就会执行该
- 函数。
- void *arg :需要传入到新协程子过程中的参数。
协程不存在亲属关系,都是一致的调度关系,接受调度器的调度。调用 create API就会创建一个新协程,新协程就会加入到调度器的就绪队列中。
回调协程的子过程
在 create 协程后,何时回调子过程?何种方式回调子过程?我们知道CPU的EIP寄存器就是存储cpu下一条指令的地址,我们可以把回调函数的地址存储到 EIP 中。这样在resume之后,就会执行协程的子过程了。
// eip 执行入口 static void _exec(void *lt) { nty_coroutine *co = (nty_coroutine *) lt; co->func(co->arg); } // 初始化协程栈 static void nty_coroutine_init(nty_coroutine *co) { void **stack = (void **) (co->stack + co->stack_size); stack[-3] = NULL; stack[-2] = (void *) co;//设置参数 co->ctx.rsp = (void *) stack - (4 * sizeof(void *)); co->ctx.rbp = (void *) stack - (3 * sizeof(void *)); co->ctx.eip = (void *) _exec;//设置回调函数入口 co->status = BIT(NTY_COROUTINE_STATUS_READY); }
协程封装posix api异步原理
在 send 与 recv 调用的时候,如何实现异步操作的?先来看一下一段代码:

在进行 IO 操作(recv,send)之前,先执行了 epoll_ctl 的 del 操作,将相应的 sockfd 从 epfd中删除掉,在执行完 IO 操作(recv,send)再进行 epoll_ctl 的 add 的动作。这段代码看起来似乎好像没有什么作用。
如果是在多个上下文中,这样的做法就很有意义了。能够保证 sockfd 只在一个上下文中能够操作 IO 的。不会出现在多个上下文同时对一个 IO 进行操作的。协程的 IO 异步操作正式是采用此模式进行的。
详细说明见目录中2.原语->代码+图 进行理解
// 创建协程recv接口 ssize_t nty_recv(int fd, void *buf, size_t len, int flags) { struct epoll_event ev; ev.events = POLLIN | POLLERR | POLLHUP; ev.data.fd = fd; //加入epoll,然后yield nty_epoll_inner(&ev, 1, 1); //resume ssize_t ret = recv(fd, buf, len, flags); return ret; } // 加入epoll,更改状态,加入wait集合,然后yield与resume static int nty_epoll_inner(struct epoll_event *ev, int ev_num, int timeout) { nty_schedule * sched = nty_coroutine_get_sched(); nty_coroutine *co = sched->curr_thread; int i; for (i = 0; i < ev_num; i++) { epoll_ctl(sched->epfd, EPOLL_CTL_ADD, ev->data.fd, ev); co->events = ev->events; //加入wait集合,添加wait状态 nty_schedule_sched_wait(co, ev->data.fd, ev->events, timeout); } //yield nty_coroutine_yield(co); for (i = 0; i < ev_num; i++) { epoll_ctl(sched->epfd, EPOLL_CTL_DEL, ev->data.fd, ev); //移除wait集合,移除wait状态 nty_schedule_desched_wait(ev->data.fd); } return ev_num; }
一个简单的使用案例
可以看到,我们编写代码只需以同步的编程方式,就能实现异步的性能了。
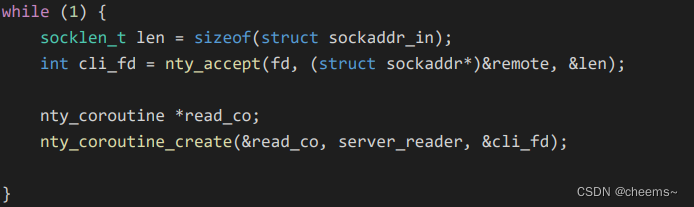
#include "nty_coroutine.h" #include <arpa/inet.h> void server_reader(void *arg) { int fd = *(int *) arg; ssize_t ret; struct pollfd fds; fds.fd = fd; fds.events = POLLIN; while (1) { char buf[1024] = {0}; ret = nty_recv(fd, buf, 1024, 0); if (ret > 0) { nty_send(fd, buf, strlen(buf), 0); } else if (ret == 0) { nty_close(fd); break; } } } void server(void *arg) { unsigned short port = *(unsigned short *) arg; int fd = nty_socket(AF_INET, SOCK_STREAM, 0); if (fd < 0) return; struct sockaddr_in local, remote; local.sin_family = AF_INET; local.sin_port = htons(port); local.sin_addr.s_addr = INADDR_ANY; bind(fd, (struct sockaddr *) &local, sizeof(struct sockaddr_in)); listen(fd, 128); while (1) { socklen_t len = sizeof(struct sockaddr_in); int cli_fd = nty_accept(fd, (struct sockaddr *) &remote, &len); printf("new client comming\n"); nty_coroutine *read_co; nty_coroutine_create(&read_co, server_reader, &cli_fd); } } int main(int argc, char *argv[]) { nty_coroutine *co = NULL; unsigned short port = 8080; nty_coroutine_create(&co, server, &port); nty_schedule_run(); //run return 0; }
5. 协程 与 调度器 结构体定义
协程定义
一个协程会有哪些状态呢?如果协程sleep了,那么就是睡眠状态,如果协程刚创建出来,那它肯定是就绪状态,如果协程在等待数据的到来,那就是等待状态。这里这里定义协程的三个运行状态{就绪,睡眠,等待}。
- 新创建的协程,加入就绪集合等待调度
- io未就绪的协程,加入等待集合等待epoll_wait
- 有sleep操作的协程,加入睡眠集合
- 就绪集合没有设置优先级,所以在就绪集合里面的协程优先级一样,那么就可以用队列来存储,先进先出
- 等待集合就是等待IO准备就绪,这个等待IO是有时间长短的,这里用红黑树来存储
- 睡眠集合需要按照睡眠时间的长短进行唤醒,所以也用红黑树存储,key为睡眠时长
我们描述了每一个协程有自己的上下文环境,需要保存 CPU 的寄存器 ctx;需要有子过程的回调函数 func;需要有子过程回调函数的参数 arg;需要定义自己的栈空stack;需要有自己栈空间的大小 stack_size;需要定义协程的创建时间birth;需要定义协程当前的运行状态 status;需要定当前运行状态的结点(ready_next, wait_node, sleep_node);需要定义协程 id;需要定义调度器的全局对象 sched。
typedef struct _nty_coroutine { //cpu ctx nty_cpu_ctx ctx; // func proc_coroutine func; void *arg; // create time uint64_t birth; //stack void *stack; size_t stack_size; size_t last_stack_size; //status nty_coroutine_status status; //root nty_schedule *sched; //co id uint64_t id; //fd event int fd; uint16_t events; //sleep time uint64_t sleep_usecs; //set RB_ENTRY(_nty_coroutine) sleep_node; RB_ENTRY(_nty_coroutine) wait_node; TAILQ_ENTRY(_nty_coroutine) ready_node; } nty_coroutine;
调度器定义
每个协程所需要使用的,而且不同的,就是协程的属性,那么每个协程所需要的,且相同的,就是调度器的属性。用来管理所有协程的属性,作为调度器的属性。调度器的属性,需要有保存 CPU 的寄存器上下文 ctx,可以从协程运行状态yield 到调度器运行的。从协程到调度器用 yield,从调度器到协程用 resume。
typedef struct _nty_schedule { // create time uint64_t birth; //cpu ctx nty_cpu_ctx ctx; //stack_size size_t stack_size; //coroutine num int spawned_coroutines; //default_timeout uint64_t default_timeout; //当前调度的协程 struct _nty_coroutine *curr_thread; //页大小 int page_size; //epoll fd int epfd; //线程通知相关,暂未实现 int eventfd; //events struct epoll_event eventlist[NTY_CO_MAX_EVENTS]; int num_new_events; //set nty_coroutine_queue ready; nty_coroutine_rbtree_sleep sleeping; nty_coroutine_rbtree_wait waiting; } nty_schedule;
6. 调度的策略
调度器的实现,有两种方案,一种是生产者消费者模式,另一种多状态运行。
生产者消费者模式

逻辑代码如下

多状态运行

逻辑代码如下

7. 协程api 与 hook
需要封装为异步的posix api分析
所有对io的操作,我们都需要取重新封装一遍。为什么不能用posix api,而是我们需要再去封装一次呢?比如我们调用recv的时候,如果我们调用系统的,那么这个fd怎么yield到调度器上呢,所以我们需要在posix api的基础上封装,当然有些接口需要封装,有些不需要。
就像下面的伪代码一样,从同步的recv变成异步的ney_recv
//伪代码 ney_recv(){ epoll add fd; yield(); epoll del fd; recv(fd); }
站在同步封装成异步的角度,如果不需要判断io是否就绪的这些api,则不需要封装为异步的。
需要封装的api,这些api在实现的时候,皆采用上面伪代码的策略
1. accept() 2. connect() 3. recv() 4. read() 5. send() 6. write() 7. recvfrom() 8. sendto()
不需要封装的api,这些api因为不会引起阻塞,所以不用封装。
socket() listen() close() fcntl() setsockopt() getsockopt()
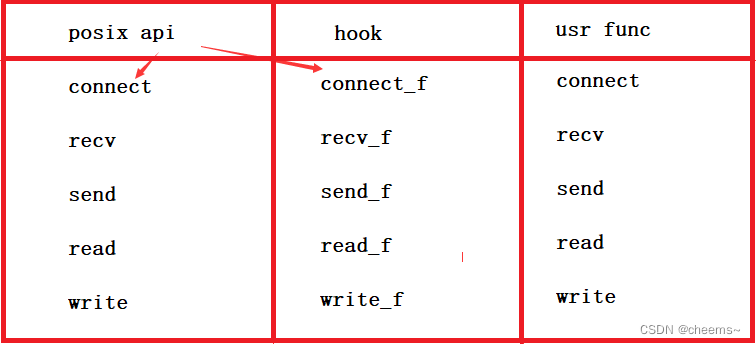
hook
我们有两种策略封装上面的api,第一种就是定义Nty_XXX(),框架独立定义一套标准接口出来。但是这种方法,如果跟mysql,redis建立连接,但是不去修改它们提供的客户端源码开发包的时候,就会发现连不上去,因为其源码用的是posix api,recv和send。而协程用的是nty_recv()和nty_send()。两者之间没有关联。
第二种就是使用hook,做成跟系统调用,跟posix api一样的接口,那么一样的接口就会引起冲突。这个冲突我们就使用hook来解决。
hook提供了两个接口;1. dlsym()是针对系统的,系统原始的api。2. dlopen()是针对第三方的库。
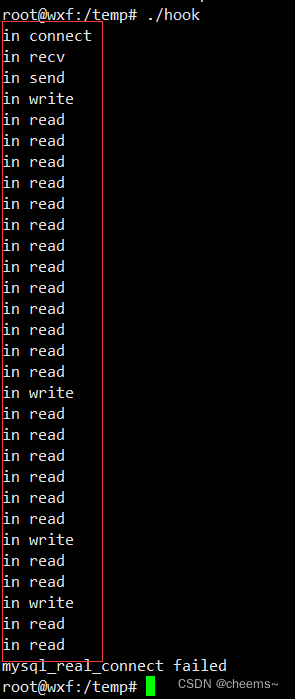
我们现在使用mysql的包去连接mysql来做hook演示,可以看到我们将系统调用的api截获了。对应下面的代码,就是这个意思。
原来的系统调用,被hook后,都变成了xxx_f , 所以我们就可以使用原来的名字,比如read,connect。而mysql包里面走的read,connect这些函数,就变成我们写的函数了,如果我们协程提供的api使用hook的做法,那么mysql,redis这类静态库,动态库的read,write都不用修改,使用了hook,就都会走我们定义的函数。
简单来说,原来的系统调用connect,被改名为connect_f , 所以原来的名字connect就空出来了,交由我们用户实现。而像mysql-dev源码里面用的都是connect,所以就会走我们用户写的函数了。
connect_f = dlsym(RTLD_NEXT, "connect");
#define _GNU_SOURCE #include <stdio.h> #include <unistd.h> #include <dlfcn.h> #include<mysql/mysql.h> // // Created by 68725 on 2022/7/17. // typedef int (*connect_t)(int, struct sockaddr *, socklen_t); connect_t connect_f; typedef ssize_t (*recv_t)(int, void *buf, size_t, int); recv_t recv_f; typedef ssize_t (*send_t)(int, const void *buf, size_t, int); send_t send_f; typedef ssize_t (*read_t)(int, void *buf, size_t); read_t read_f; typedef ssize_t (*write_t)(int, const void *buf, size_t); write_t write_f; int connect(int fd, struct sockaddr *name, socklen_t len) { printf("in connect\n"); return connect_f(fd, name, len); } ssize_t recv(int fd, void *buf, size_t len, int flags) { printf("in recv\n"); return recv_f(fd, buf, len, flags); } ssize_t send(int fd, const void *buf, size_t len, int flags) { printf("in send\n"); return send_f(fd, buf, len, flags); } ssize_t read(int fd, void *buf, size_t len) { printf("in read\n"); return read_f(fd, buf, len); } ssize_t write(int fd, const void *buf, size_t len) { printf("in write\n"); return write_f(fd, buf, len); } static int init_hook() { connect_f = dlsym(RTLD_NEXT, "connect"); recv_f = dlsym(RTLD_NEXT, "recv"); send_f = dlsym(RTLD_NEXT, "send"); read_f = dlsym(RTLD_NEXT, "read"); write_f = dlsym(RTLD_NEXT, "write"); } void main() { init_hook(); MYSQL *m_mysql = mysql_init(NULL); if (!m_mysql) { printf("mysql_init failed\n"); return; } if (!mysql_real_connect(m_mysql, "192.168.109.1", "root", "123456", "cdb", 3306, NULL, 0)) { printf("mysql_real_connect failed\n"); return; } else { printf("mysql_real_connect success\n"); } } //gcc -o hook hook.c -lmysqlclient -I /usr/include/mysql/ -ldl
如果我们的协程ntyco要和mysql做在一起,我们在不修改mysql-dev的前提下,只要把下面的接口做成hook即可
1. accept() 2. connect() 3. recv() 4. read() 5. send() 6. write() 7. recvfrom() 8. sendto()
8. 多核模式
解决协程多核的问题有两种方式,多线程/多进程 与 CPU核心做亲和性。
- 多进程(实现起来容易,对协程代码本身不用去改)
- 多线程(复杂,需要对调度器进行加锁)
那么做多线程对调度器进行加锁,锁放在哪呢?锁放在调度器结构体里面,因为调度器是全局唯一的,那么要锁哪里呢,很明显,<取协程,恢复协程>,这里需要加锁。
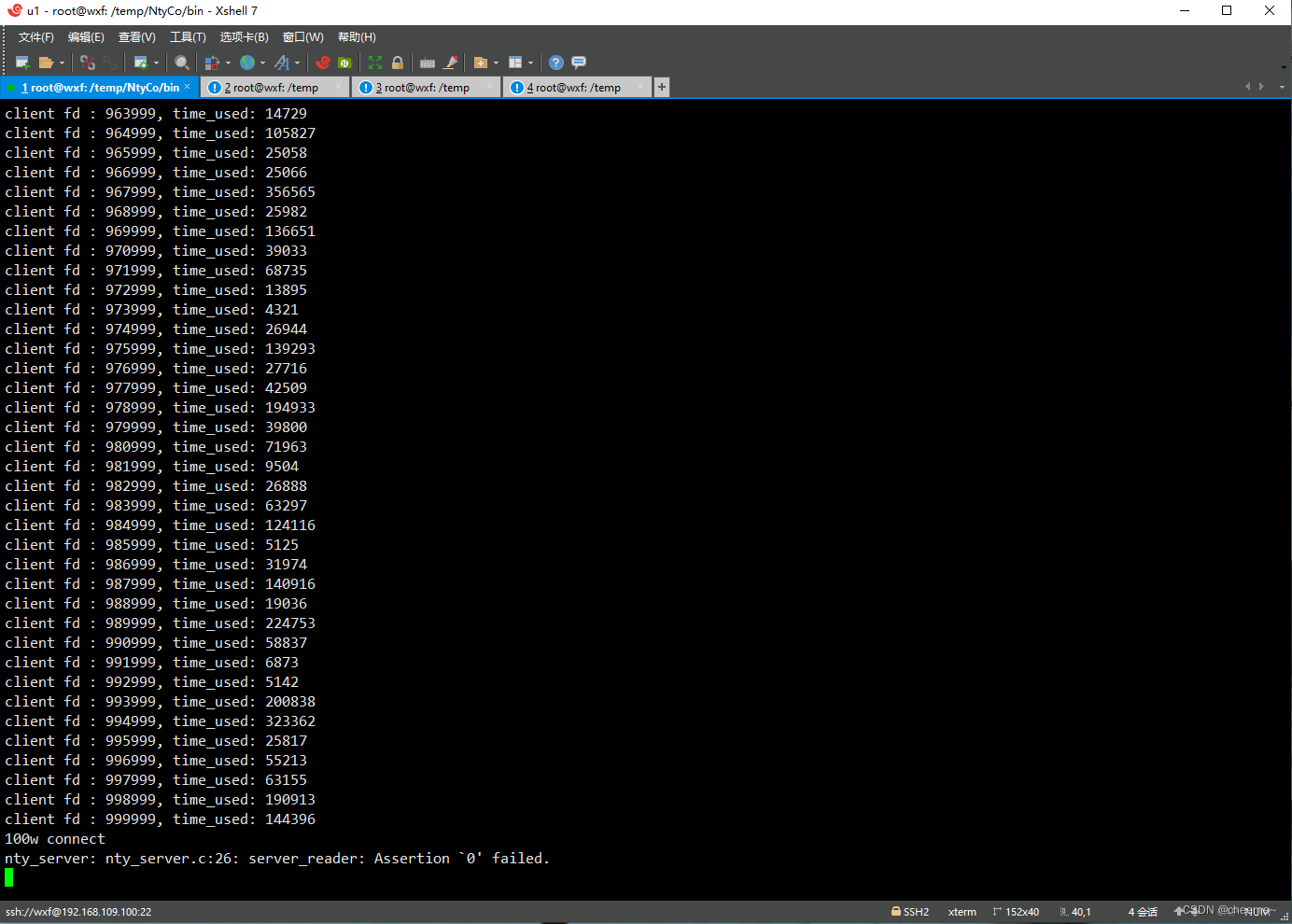
9. 协程性能测试
4 台 VMWare 虚拟机
1 台服务器 14G 内存,1 核 CPU
3 台客户端 4G 内存,1 核 CPU
操作系统:ubuntu 18.04.6
服务端测试代码: 服务器端测试代码
客户端测试代码:客户端测试代码
按照每一个连接启动一个协程来测试,每个协程栈4k,测试协程数量100w无异常,并且能够正常收发数据。