 林伟_FPGA
林伟_FPGA
林伟_FPGA_个人页
林伟_FPGA

文章
2
问答
0
视频
0
个人介绍
思维发散的FPGA工程师,正球级后备干部。
擅长的技术

暂无更多信息
2024年05月
-
03.31 09:51:45
 发表了文章
2024-03-31 09:51:45
发表了文章
2024-03-31 09:51:45
在实用化人形机器人控制系统中深入应用FPGA的框架设计(基于特斯拉Optimus-Gen2的硬件系统)
针对实用化人形机器人的控制系统,以深入应用FPGA技术为指导思想做了一个框架设计,提供一个具象化的设计实例、参考技术方案,协助各研发团队及相关决策者了解这一技术思路的价值。 进而,笔者希望读者将这个框架设计与《在实用化人形机器人研发流程中深入应用FPGA技术的流程图》结合起来进行分析、思考,希望: 进一步降低将FPGA深入应用于人形机器人在纯粹技术维度上的门槛; 助力更多正在人形机器人领域参与竞争的团队 -- 及时做出实质性决策,及时将更多资源分配到深入应用FPGA技术这一竞争维度。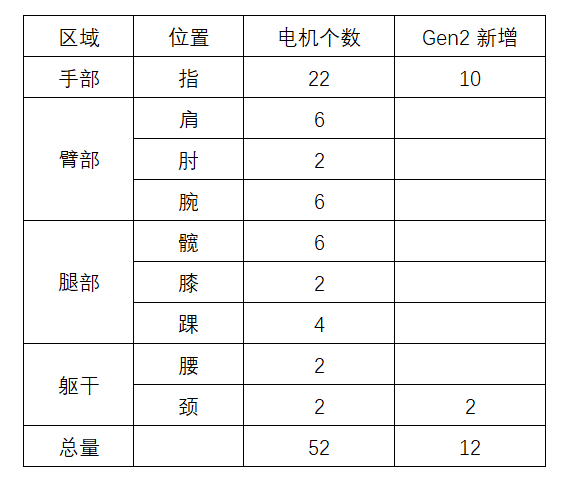
-
03.20 20:41:11发表了文章
2024-03-20 20:41:11
在实用化人形机器人研发流程中深入应用FPGA技术的流程图(基于工信部《人形机器人创新发展指导意见》)(版本A)
这个流程图将人形机器人视为一个多入多出的反馈控制系统,针对实现工信部《人形机器人创新发展指导意见》所要求的以应对真实场景下的复杂环境与任务、应对突发情况为特征的实用化人形机器人功能需求,在基于CPU+软件体系结构的人形机器人控制系统之中涉及多通道并行处理且需精准协同、强实时性(低延迟量+低延迟抖动量)、大运算量、大数据传输量且构成实时性性能瓶颈的环节中导入FPGA。
-
发表了文章
2024-05-15
在实用化人形机器人控制系统中深入应用FPGA的框架设计(基于特斯拉Optimus-Gen2的硬件系统)
-
发表了文章
2024-05-15
在实用化人形机器人研发流程中深入应用FPGA技术的流程图(基于工信部《人形机器人创新发展指导意见》)(版本A)
滑动查看更多
暂无更多信息
暂无更多信息