
有人了解无人超市自动理货系统吗?

提起无人超市大家并不陌生,相信大部分人一定亲临或者听过阿里巴巴的盒马鲜生。疫情之下,可以看到超市人群密布,超市的工作人员纷纷穿上了和医护人员一样的全身“隔离套装”,而无人超市、自动口罩售卖机等必将成为疫情之下的大趋势。今天在线征集无人超市的黑科技以及自动理货系统。
往期精彩干货内容汇总:
小白求助:
零基础入门kubernetes需要哪些知识?https://developer.aliyun.com/ask/273946
Flutter有哪些必知的框架原理和常用工具?https://developer.aliyun.com/ask/273907
关于入门微服务,那些你必懂的知识 https://developer.aliyun.com/ask/273861
Java经典1000问 https://developer.aliyun.com/ask/257905
开发者社区邀你加入钉钉群聊社区问答,和大家一起闲来无事探讨技术二三事,解决技术难题我最行,悠哉游哉技术论文小分享,群内电子技术期刊多多多~点击进入查看详情 https://qr.dingtalk.com/action/joingroup?code=v1,k1,B+0m7X2kV4zJsN9DzgowaMmX4ELIQ0ty96RtPFA9J9Y=&_dt_no_comment=1&origin=11
也可钉钉扫描下方二维码 
版权声明:本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《阿里云开发者社区用户服务协议》和《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
-
阿里无人超市赚够了眼球,超市没有了收银员,方便了许多,这时我就在想如果理货的环节也智能化哪,哪岂不是从进货验货到进仓到理货上架到销售完全数据控制机器实现哪?如果超市这点能解决了算不算物联,想法有点大,那就聊一聊。

这次先聊货物出仓到货架上这个过程,货物从仓库货架到超市货架这个过程庞杂,简化一下无非需要一个运送机器人,和一套运送机器人的控制系统。运送机器人或者称货物自动上下架机器人德国就做过实体有兴趣的可以去搜名字我实在想不起来了,不过我感觉它那个有些笨重,而且不适合作为超市运送商品使用,我就设计了一款,不过也只是处于最初的结构阶段,图下面有,就是丑点但实用,详细的介绍可以搜一下专利:物件靠单动力源多维运动的装置,申请号:CN201811148399.2,结构是可以实现将物件运送到指定高度的指定的位置,在该装置底部装个可以循迹的运动底盘,商品就能实现从仓库运送到超市货架的过程。
结构不是运送的难点,运送的难点就是商品形状大小不一如何给商品定位,商品的定位是机器人识别它准确位置的关键,也是整个运送过程的难点。我是学材料成型的,正好学过一门单片机的选修,就我所能达到最智能的方法跟大家聊一下我是如何将货物定位实现商品自动上架完成理货的,电控方面我就不说了。
商品存放在架子上的位置可以抽象成一个坐标点,有了坐标点运送机器人可以指定行动路线,有了坐标点机器人通过上升结构就可以将商品运送到指定的位置点上。至于坐标系如何建立,可以结合超市有序货架和货架每层高度规格有序这些特点建立,每件商品摆放位置就是一个坐标值,这个需要提前录入,不过没有哪家超市天天将商品移位吧,所以基本是输入一遍,若更改商品位置就更改商品的录入坐标值。
第一种商品定位方式,将商品放在物件拖放台(2-3)上,物件运送机器人头部(2-6)带有光线照射装置,垂直向下对物件照射,物件拖放台下侧装有光线感应装置,直光照到物件上往物件拖放台上的投影是物件的外轮廓俯视图,得到物件长为l,宽为w,取两者较小的值作为物件运送机器人定位参数,设置超市某点为的空间坐标原点,底盘某点为运动坐标点,以运动坐标点在超市的空间坐标的坐标值实现运动底盘(2-1)运动定为和商品运动定位,以超市货架个数为坐标Y值,以架子横向长度为坐标X值,货架的层数为Z值,坐标Y值为货架个数为整数(以最简单的情况一排货架为例),坐标X值为放置物件的架子长度,一种是将X平均分成多份,X值为整数,将架子分成大小相同的格子空间,一个商品对应一个格子,运动底盘(2-1)运动定位只需要识别物件所具有的X值Y值,就可完成运动底盘的运动定位,运动底盘通过感应装置(2-2)识别运动路线到达指定坐标点,然后通过上升机构将商品推动到货架的指定位置上。另一种是不平分X值,商品的X值可以根据商品实际大小定,可以以商品底部中心为基准点确定坐标,之前说投影就是为了确定商品是横放还是竖放,若商品的坐标确定之后,将商品的坐标值提前输入,运送机器人根据商品的坐标值将商品送到指定位置上。商品出超市后回馈给运送机器人,重复商品的运送过程,实现商品自动上架的功能,配上一个具有下架功能的货架,过期商品通过货架将商品推给运送机器人,运送机器人通过上架的反运动实现商品下架,下架结构我也有一个简单的设计,详情可以搜专利实现物件自动上下架装置,申请号 : CN201811303931.3。
另一种商品定位方式,架子横向摆放商品空间长度为L,量得物件长l宽w值,以l为较小的值为例,则X值为L-l/2,架子商品存放架子位置实时存入运动机器人芯片中,当存放下一件商品时,架子横向摆放商品空间长度为L-l,物件摆放到智能摆放架上,物件的坐标值即为商品的位置,所有商品已经上架的位置信息储存在运送机器人芯片中,商品上架顺序第一级是从第一排货架第一层最左侧到最右侧,第二级第一排第二层左侧到第一排第二层最右侧,以此类推最小级为最后一排最高层最左侧到最后一排最高层最右侧,商品l值为变值,当l值大于货架所剩空间横向长度时,则商品进入下一级商品排放顺序,直至商品定位至合适位置,架子上有商品取下后,该商品的定位坐标点会储存到运送机器人芯片中,有新商品需要摆放,则判断两个商品的长度值,当新商品的长度值小于原放商品长度值时,新商品会上架到该位置,会给运送机器人输送新的位置数据,且输出所剩空间的长度值留给下件商品做比较,所有已经上架的商品的坐标值会实时存入运送机器人的芯片中,商品上架的运动过程,运送机器人读取商品外轮廓信息,得到商品长度值,以商品上架顺序定位商品在货架上的摆放位置,输出坐标值,运送机器人根据坐标X值Y值定制运动底盘(2-1)行走路线,由感应装置(2-2)感应路线信息及沿途路况,当运送机器人到达指定位置时,物件拖放台(2-3)在物件上升装置(2-4)的作用下上升,物件拖放台(2-3)带动物件上升的高度由物件坐标Z值决定,以机械手(2-4)的某点作为物件拖放台(2-3)上升过程中的坐标点,当物件拖放台(2-3)到达指定高度时,物件上升装置(2-4)悬停物件拖放台(2-3),机械手(2-4)开始运作将商品推到架子上完成商品上架。 暂时只是考虑每排货架单排商品的情况,学识着实浅薄,就结构的话我能多聊聊,但是就系统的话我是真的学浅,就是提供一下自己的思路,作为考研失败的我能扯这么多也不容易,最近要投简历各种笔试所以写的很简陋,大家有兴趣就看看,可以聊聊,这第二种定位方式更适合驿站的快递件的自动上架,配上自动下架的装置,那快递进了驿站然后怎样大家可以想想我觉得这个很开源的。
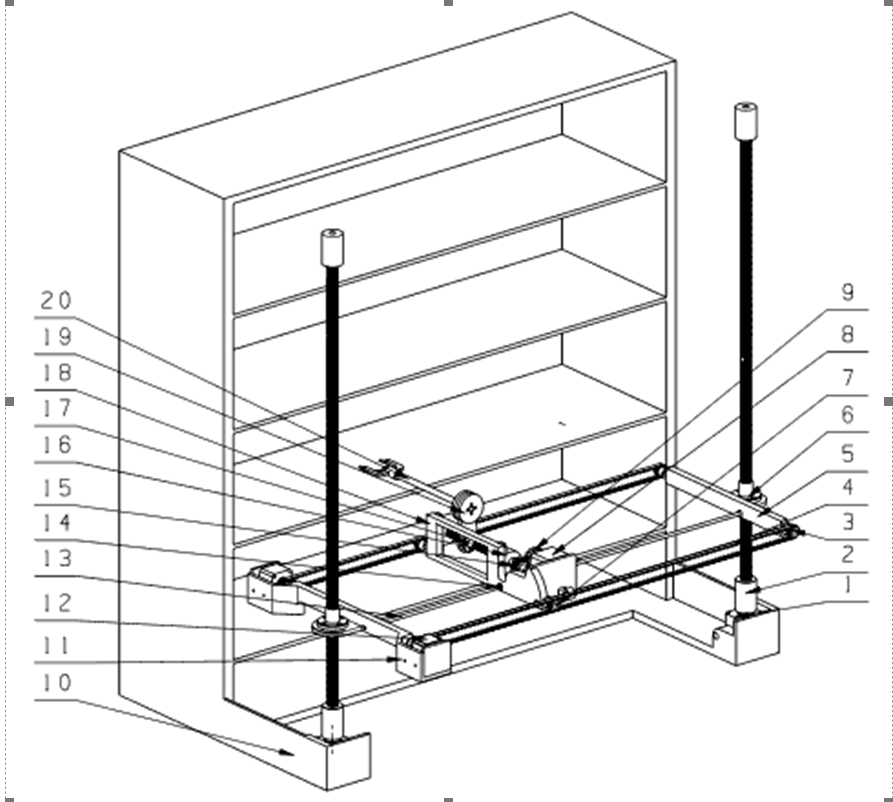
图1 货架
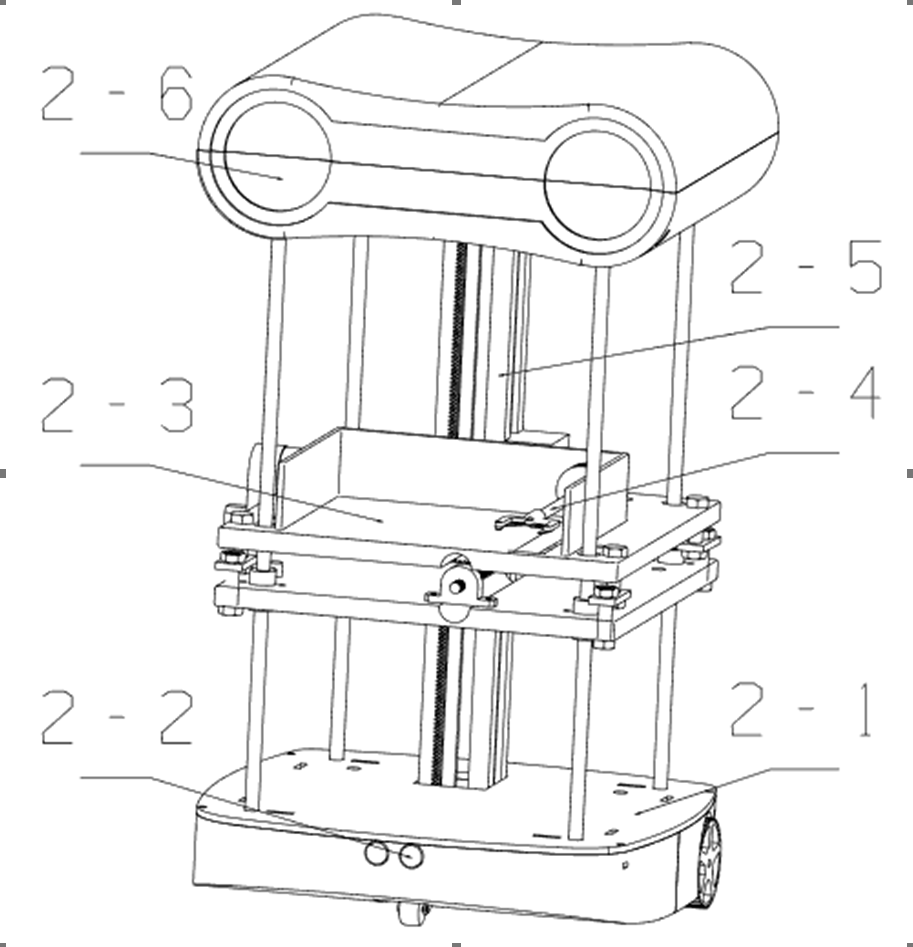
图2 运送机器人
图2中2-1.运动底盘、2-2.感应装置、2-3.物件拖放台、2-4.机械手、2-5. 拖放台上升装置、2-6. 物件运送机器人头部。
-内容来源于开发者社区独家,禁止转载-
2020-03-06 14:53:50赞同 展开评论