https://open.dingtalk.com/document/resourcedownload/Introduction-to-stream-mode
按照上面文档的例子,点击卡片上的按钮,无法监听到回调操作。
.registerCallbackListener("/v1.0/im/bot/messages/get", robotMsgCallbackConsumer)
监听/v1.0/im/bot/messages/get正常
.registerCallbackListener("/v1.0/card/instances/callback", yourListener)
监听/v1.0/card/instances/callback不正常
求回复
版权声明:本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《阿里云开发者社区用户服务协议》和《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
绝对是钉钉的BUG,希望尽快修复
解决了,注册的监听器没有问题,问题出在发送卡片的方式
使用机器人直接发送的卡片无法回调:https://open.dingtalk.com/document/orgapp/send-interactive-dynamic-cards-1
使用卡片创建、投放接口投放的卡片可以回调,需要设置模式为setCallbackType("STREAM"); https://open.dingtalk.com/document/orgapp/delivery-card-interface
根据您的描述,钉钉机器人在使用 stream 模式下无法监听到卡片互动回调。
路径设置问题:请确保您正确设置了回调监听的路径。在示例中,您应该将 "/v1.0/card/instances/callback" 设置为回调监听的路径。
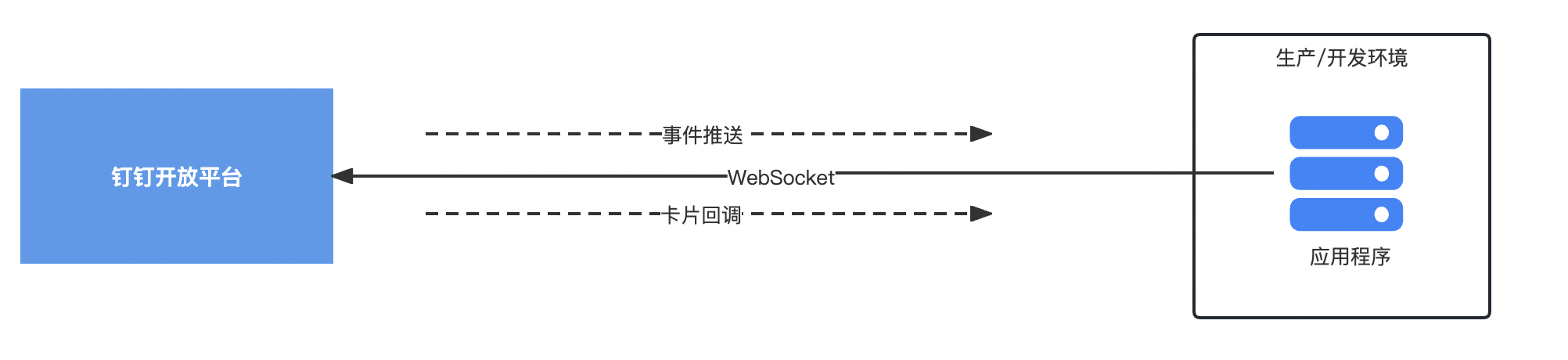
Stream模式原理
在 Stream 模式下,开发者的应用程序通过集成 SDK 的方式与钉钉开放平台建立一条 WebSocket 连接,建立连接过程中开放平台将对连接进行鉴权。当有卡片回调发生时,开放平台将通过 WebSocket 连接将数据通知到开发者的应用程序。开发者的应用程序可以接收到这些数据并进行相应处理,从而实现与钉钉开放平台的实时通信,参考下图所示