
前言
经过前面的理论知识介绍,我们已经掌握了各种色彩空间类型。本篇博文主要介绍在OpenCV中,如何用代码实现色彩空间类型的转换。
RGB与GRAY互相转换
在OpenCV内,我们使用cv2.cvtColor()函数实现色彩空间的转换。该函数色彩空间类型用枚举类型表示,其中COLOR_BGR2GRAY枚举类型就是专门提供给给RGB转GRAY的。
具体代码如下所示:
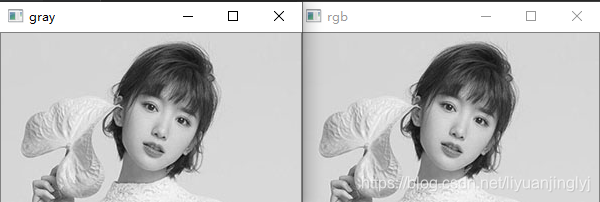
import cv2 img = cv2.imread("4.jpg", -1) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) cv2.imshow("rgb", img) cv2.imshow("gray", gray) cv2.waitKey() cv2.destroyAllWindows()
运行之后,效果如下图所示:

接着,我们再来看看GRAY如何转换为RGB,具体代码如下所示:
import cv2 img = cv2.imread("4.jpg", 0) bgr = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR) cv2.imshow("gray", img) cv2.imshow("rgb", bgr) cv2.waitKey() cv2.destroyAllWindows()
运行之后,显示效果如下图所示:
需要注意的是,RGB图像的颜色3维矩阵是BGR,所以我们转换的时候都是通过BGR2GRAY与GRAY2BGR进行的。从这里我们也可以看出来,其枚举类型常量其实非常好理解,无非就是将转换类型名称颠倒即可。
但是,我们发现灰度图像转换为RGB图像是没有变化的,因为灰度图像没有颜色值,运算不可能通过凭空想象的方式还原,但是灰度图像转RGB图像还有具有一定意义的,假如你需要上色,那么灰度图像是一个二维矩阵,它不是颜色值的三维矩阵,你是无法赋值的。而通过GRAY转RGB后,可以像操作RGB图像一样更改某个像素的颜色值,虽然它是灰色。
RGB与HSV互相转换
同上面代码类似,通过cv2.cvtColor()来转换色彩空间:
import cv2 img = cv2.imread("4.jpg", -1) hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) cv2.imshow("bgr", img) cv2.imshow("hsv", hsv) cv2.waitKey() cv2.destroyAllWindows()
运行之后,我们会得到如下所示的图像:
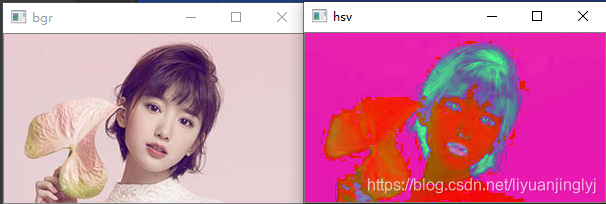
在前面的理论知识中,我们可以根据色调的值获取某种颜色,也就是可以通过在HSV的H通道上的值,提取特定的颜色。这种提取分析颜色的优势可以在人脸识别中识别肤色等。
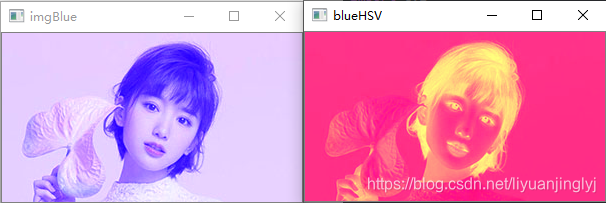
下面,我们来用蓝色试一试,具体代码如下所示:
import cv2 img = cv2.imread("4.jpg", -1) img[:, :, 0] = 255 Blue = img blueHSV = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) cv2.imshow("imgBlue", Blue) cv2.imshow("blueHSV", blueHSV) cv2.waitKey() cv2.destroyAllWindows()
运行之后,效果如下所示:
现在,我们来提取它的红色区域,完整代码如下所示:
import cv2 import numpy as np img = cv2.imread("4.jpg") hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) cv2.imshow("hsv", hsv) minBlue = np.array([0, 50, 50]) maxBlue = np.array([30, 255, 255]) # 确定蓝色区域 mask = cv2.inRange(hsv, minBlue, maxBlue) # 通过按位与获取蓝色区域 blue_img = cv2.bitwise_and(img, img, mask=mask) cv2.imshow("blue", blue_img) cv2.waitKey() cv2.destroyAllWindows()
这里,我们用到了一个新的方法cv2.inRange(),它的定义如下所示:
def inRange(src, lowerb, upperb, dst=None):
src:表示要检查的数组或头像
lowerb:表示范围下界
upperb:表示范围上界
通过该方法,我们能判断图像内的像素点的像素值是否在某个区间。
经过前面的理论讲解,我们知道,HSV的H等于0为红色。为了兼容性,我们需要将红色的值上下扩展一些,但本身是颜色范围不能小于0,所以我们只能扩展上界限,也就是扩大30范围。
而HSV中的S通道,V通道取值范围为[100,255]。所以,这里我们为了获取到图像红色的值,将界限限定在[0, 50, 50]到[30, 255, 255]之间,运行之后,提取到了图像的红色:
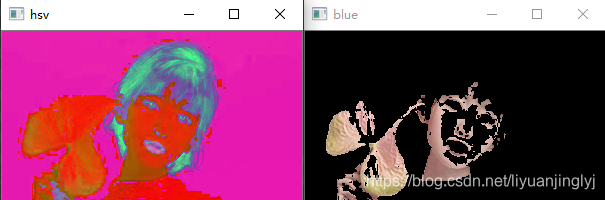
从本例可以看出来,我们通过cv2.inRange()可以将图像内指定范围的值标注出来,在返回到mask中。如果图像的值位于该区间,则mask对应位置上的值为255,反之为0。然后,通过掩摸按位与运算将指定颜色取出来。
这里我们的bitwise_and有了第3个参数mask,利用掩摸(mask)进行“与”操作,即掩膜图像白色区域是对需要处理图像像素的保留,黑色区域是对需要处理图像像素的剔除。
