游客iigf2m33ba53k

已加入开发者社区1021天
勋章

专家博主
专家博主

星级博主
星级博主

技术博主
技术博主

初入江湖
初入江湖



我关注的人
粉丝
游客in3d2jyl5tsai
游客in3d2jyl5tsai
游客4snvrgn254kfg
游客4snvrgn254kfg
游客7jg3falezzovc
游客7jg3falezzovc
Anny2023
Anny2023
天天向上20160601
天天向上20160601
码字猴儿
码字猴儿
aliyun8562423054-13673
aliyun8562423054-13673
游客u4ivk5t3bybd4
游客u4ivk5t3bybd4
五只猫的爸
五只猫的爸
游客d4ctjwcbkna34
游客d4ctjwcbkna34
游客2k3ho6lengldi
游客2k3ho6lengldi
游客hafirrw3glhbe
游客hafirrw3glhbe
技术能力
兴趣领域
擅长领域
技术认证
暂时未有相关云产品技术能力~
暂无个人介绍
暂无精选文章
暂无更多信息
2023年01月
-
01.17 14:11:42
 发表了文章
2023-01-17 14:11:42
发表了文章
2023-01-17 14:11:42
标注成本降低5倍!LaserMix:通用半监督LiDAR点云分割框架(新加坡南洋理工大学)
一个新颖的半监督LiDAR点云分割框架,有效地利用了LiDAR传感器和自动驾驶场景中的结构先验(spatial prior)对分割模型进行一致性约束,在主流的自动驾驶数据集(nuScenes ,SemanticKITTI ,ScribbleKITTI )上实现了优异的分割性能。
-
01.17 13:49:33发表了文章
2023-01-17 13:49:33
玩转水平集 | 弱监督实例分割新SOTA!(ECCV2022)
全监督学习需要大量的标签数据,对分割任务而言,人工标注十分昂贵,因此基于框的弱监督实例分割获得了广泛的关注。本文提出一种新的single-shot框监督实例分割方法,将水平集(level-set)与CNN巧妙地结合起来。具体来说,模型以端到端的方式通过基于连续Chan-Vese能量的函数迭代地学习一系列水平集。本文基于SOLOv2上实现弱监督实例分割。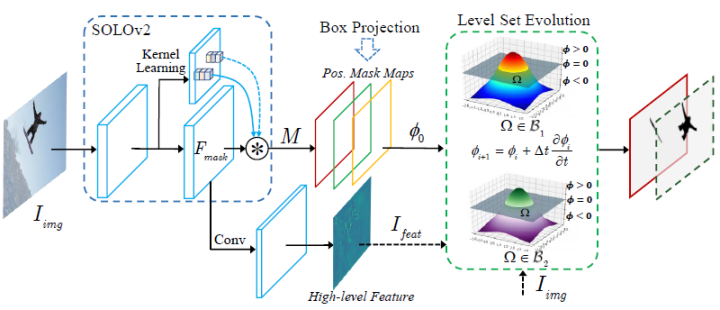
-
01.17 13:45:20发表了文章
2023-01-17 13:45:20
最新BEV感知基线 | 你确定需要激光雷达?(卡内基梅隆大学)
camera和其他传感器相比成本更低,而激光雷达系统的成本很高,因此为不依赖激光雷达构建三维感知系统是一个关键的研究问题。目前主流方法使用多个camera的多视图数据,并将透视图像中的特征“提升”到二维地平面,从而产生车辆周围三维空间的“鸟瞰视图”(BEV)特征表示。最近的研究重点是如何将特征从图像提升到BEV平面。相反,我们提出了一个简单的基线模型,其中“提升”步骤简单地平均了所有投影图像位置的特征,并发现它优于目前SOTA方案的BEV vehicle 分割。消融实验表明,bs_size、数据增强和输入分辨率在很大程度上影响性能。
-
01.17 13:44:02发表了文章
2023-01-17 13:44:02
ECCV2022 | 多任务SOTA模型!分割/深度/边界/显著图四项任务
本文提出了一种新的端到端倒金字塔多任务Transformer算法(InvPT),以在统一的框架中同时对多个空间位置和多任务进行建模。
-
01.17 13:35:59发表了文章
2023-01-17 13:35:59
2022最新综述!一文详解自动驾驶中的多模态融合感知算法(数据级/特征级/目标级)
多模态传感器融合意味着信息互补、稳定和安全,长期以来都是自动驾驶感知的重要一环。然而信息利用的不充分、原始数据的噪声及各个传感器间的错位(如时间戳不同步),这些因素都导致融合性能一直受限。本文全面调研了现有多模态自动驾驶感知算法,传感器包括LiDAR和相机,聚焦于目标检测和语义分割,分析超过50篇文献。同传统融合算法分类方法不同,本文从融合阶段的不同将该领域分类两大类、四小类。此外,本文分析了当前领域存在的问题,对未来的研究方向提供参考。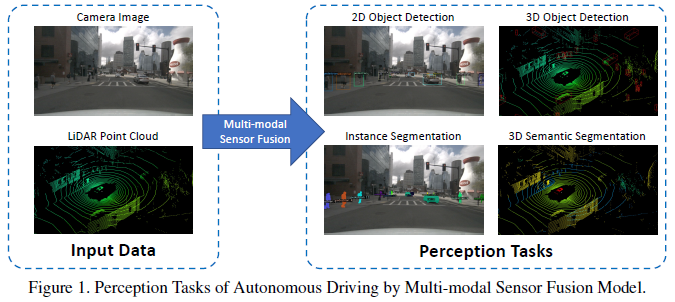
-
01.17 13:32:41发表了文章
2023-01-17 13:32:41
2022最新综述 | 面向大规模场景的小目标检测:综述和 benchmark
目标检测在过去几年中取得了显著的进展,然而,由于小目标视觉特征较差、噪声较多,小目标检测已成为计算机视觉中最具有挑战性的任务之一。此外,用于小尺寸目标检测的大规模基准测试数据集仍然不够全面。本文首先对小目标检测方法进行了全面的回顾,除此之外,还构建了两个大规模小目标检测数据集(SODA),SODA-D和SODA-A,分别关注驾驶场景和空中场景。
-
01.17 13:28:26发表了文章
2023-01-17 13:28:26
史上最全 | 计算机视觉2D/3D标注工具汇总!
标注工具是处理原始数据的第一关,无论是检测任务、分割任务还是3D感知、点云等,都需要制作真值来监督网络学习。企业级的标注方案一般通过内部的自研工具或专业标注团队完成,而对于个人或小的团队来说,一款开源好用的标注工具则至关重要,自动驾驶之心为大家汇总了领域常用到的标注工具,涉及2D检测分割/3D检测分割以及多传感器的标定同步。
-
01.17 13:25:30发表了文章
2023-01-17 13:25:30
登顶KITTI!Mix-Teaching:适用于单目3D目标检测的半监督方法【清华大学】
单目3D目标检测是自动驾驶必不可少的感知任务。然而,对大规模有标签数据的高度依赖使得模型优化过程成本高昂且耗时。为了减少对人工标注的过度依赖,我们提出了Mix-Teaching,这是一种有效的半监督学习框架,可以在训练阶段同时使用标注和无标注的图像。Mix-Teaching首先通过自我学习训练为无标签图像生成伪标签。然后通过将实例级图像块粘贴到空白背景或有标签图像中,在具有更密集和更精确标签的混合图像上训练学生模型。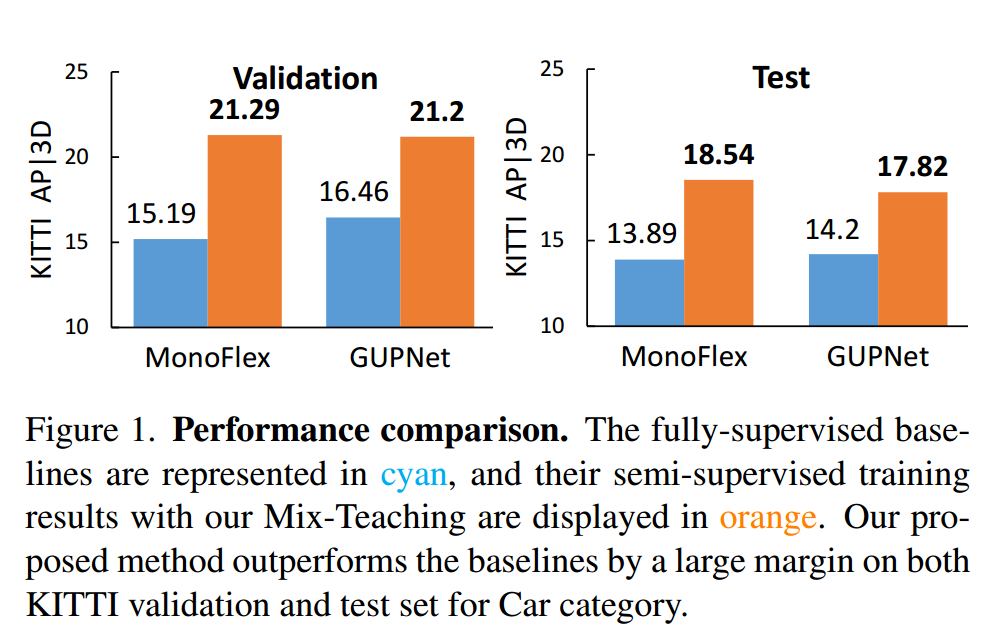
-
01.17 13:20:36发表了文章
2023-01-17 13:20:36
GANet:基于关键点的全局关联车道线检测网络(CVPR2022)
车道检测是一项具有挑战性的任务,需要预测车道线的复杂拓扑形状并同时区分不同类型的车道。早期的工作遵循自上而下的路线图,将预定义的锚回归到各种形状的车道线,由于锚形状固定,缺乏足够的灵活性来适应复杂的车道形状。
-
01.17 13:17:40发表了文章
2023-01-17 13:17:40
Wilddash2 | 最新自动驾驶全景分割数据集!CVPR2022
本文提出了三点改进自动驾驶场景下全景分割的方法。首先,本文提出的标签策略统一了四个目前主流的自动驾驶全景分割数据集,并添加了新的车辆标签(皮卡车和货车)来清理混乱的标签。为了将新标签添加至现有设置中,本文提供了Mapillary Vistas、IDD、Cityscapes数据集的完整新标签信息。
-
01.17 13:15:19发表了文章
2023-01-17 13:15:19
登顶KITTI和NuScenes | 2DPASS:2D先验辅助的激光雷达点云语义分割!ECCV2022
语义分割在大规模室外场景理解中起着至关重要的作用,在自动驾驶和机器人技术中有着广泛的应用[1-3]。在过去几年中,研究界投入了大量精力,使用相机图像[4-7]或激光雷达点云[2,8-12]作为输入来理解自然场景。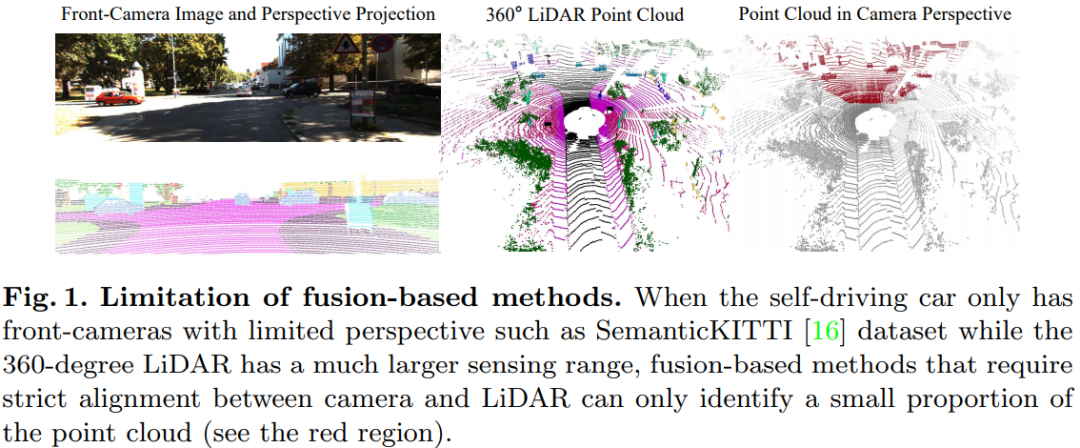
-
01.17 13:12:14发表了文章
2023-01-17 13:12:14
2022最新 | 室外单目深度估计研究综述
原文首发微信公众号【自动驾驶之心】:一个专注自动驾驶与AI的社区(https://mp.weixin.qq.com/s/NK-0tfm_5KxmOfFHpK5mBA)
-
01.17 13:08:37发表了文章
2023-01-17 13:08:37
AutoAlignV2:多模态3D目标检测新SOTA!(ECCV2022)
点云和RGB图像是自动驾驶中常用的两种感知数据来源,前者可以提供精确的目标定位,后者包括丰富的语义信息。针对3D目标检测中这两种模态的融合,之前提出的AutoAlign方法提出了一种可学习的范式,但由于全局注意力机制,计算开销很大。为了解决这个问题,本文提出了跨域的DeformCAFA模块,它更加关注跨域关系建模中的稀疏可学习采样点,提高了校准误差的容忍度,从而极大加快了不同模态特征间的融合。为了克服GT-AUG在多模态下的复杂设置,在给定深度信息的情况下,设计了一种简单而有效的交叉模态增强策略。而且,通过采用一种新颖的图像级dropout训练方案,模型能够以动态的方式进行推理。
-
01.17 13:05:43发表了文章
2023-01-17 13:05:43
自动驾驶感知多任务学习网络方法盘点!(检测/分割/车道线/关键点/深度估计)
多任务学习是自动驾驶领域非常重要的一个模块,旨在通过一个网络在较小计算量下实现多个任务,比如分割、检测、关键点、车道线等,除了具有节省计算量的优势外,多任务之间还具有一定的相互辅助作用,比如分割任务会帮助检测任务提升整体性能,下面梳理下自动驾驶领域常用到的一些多任务学习网络;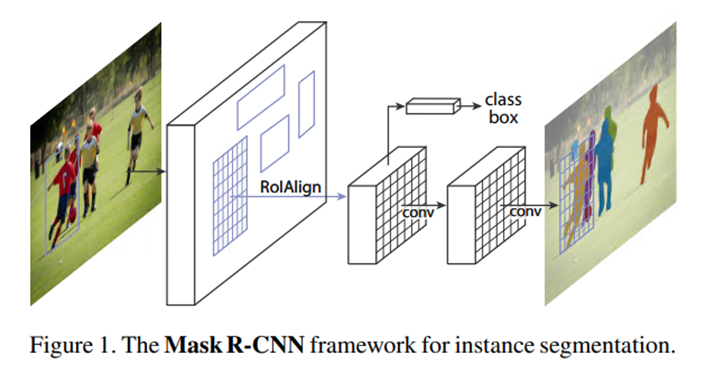
-
01.17 12:59:38发表了文章
2023-01-17 12:59:38
Panoptic-PartFormer:首篇端到端全景部件分割算法,代码已开源!(ECCV2022)
全景部件分割(PPS)旨在统一全景分割和部件分割。先前的工作主要使用不同的方法来单独处理thing、stuff和part,并未进行任何的计算共享和任务关联。因此本文搭建了一个统一的框架,即Panoptic-PartFormer来实现上述工作。本文在 Cityscapes PPS 和 Pascal Context PPS数据集上取得了最先进的结果,同时减少了70%的计算量和50%的参数量。相比于以往方法,在 Pascal Context PPS 数据集上,ResNet50主干下取得3.4%的提升,使用 Swin Transformer后,获得了10%的性能提升。
-
01.17 12:56:34发表了文章
2023-01-17 12:56:34
2D/3D车道线数据汇总
道路上的对象可以分为两大类:静态对象和动态对象。车道标线是公路上的主要静态组成部分, 为了鼓励行业解决高速公路上的车道检测问题,图森发布了大约7000个1秒长的视频剪辑,每个视频剪辑20帧。
-
01.17 12:53:25发表了文章
2023-01-17 12:53:25
高效轻量级语义分割综述
语义分割是自动驾驶中视觉理解的重要组成部分。然而当前SOTA的模型都非常复杂和繁琐,因此不适合部署在计算资源受限且耗时要求较低的车载芯片平台上。本文深入研究了更紧凑、更高效的模型以解决上述问题,这些模型能够部署在低内存嵌入式系统上,同时满足实时推理的需求。本文讨论了该领域一些优秀的工作,根据它们的主要贡献进行归类,最后本文评估了在相同软硬件条件下模型的推理速度,这些条件代表了一个典型的高性能GPU和低内存嵌入式GPU的实际部署场景。本文的实验结果表明,许多工作能够在资源受限的硬件上实现性能和耗时的平衡。
-
01.17 12:49:37发表了文章
2023-01-17 12:49:37
ViT强势应用 | V2X基于ViT提出了一个具有V2X通信的强大协作感知框架
在本文中研究了Vehicle-to-Everything(V2X)通信在提高自动驾驶汽车感知性能方面的应用。使用新颖的vision Transformer提出了一个具有 V2X 通信的强大协作感知框架。
-
01.16 19:32:35发表了文章
2023-01-16 19:32:35
SE-ProPillars | 一个具备鲁棒性的实时3D目标检测方法
这项工作旨在通过专注于使用路边激光雷达对环境的 3D 感知来应对自动驾驶的挑战。作者设计了一个 3D 目标检测模型,可以实时检测路边 LiDAR 中的交通参与者。本文的模型使用现有的 3D 检测器作为基线并提高了其准确性。
-
发表了文章
2023-02-20
逐步揭开模型面纱!首篇深度视觉建模中的可解释AI综述
-
发表了文章
2023-02-20
面向工程,高精度高效率!Fast BEV:快速而强大的BEV感知基线(NIPS2022)
-
发表了文章
2023-02-20
目标跟踪 | 3D目标跟踪高级入门!
-
发表了文章
2023-02-20
3D目标检测中点云的稀疏性问题及解决方案
-
发表了文章
2023-02-20
美团最新!FastPillars:基于Pillar的最强3D检测落地方案
-
发表了文章
2023-02-20
单目3D检测入门!从图像角度分析3D目标检测场景:MonoDLE
-
发表了文章
2023-02-20
最新综述!基于视觉的自动驾驶环境感知(单目、双目和RGB-D)
-
发表了文章
2023-02-20
诺亚最新!AOP-Net:一体式3D检测和全景分割的感知网络
-
发表了文章
2023-02-20
最新导航综述!SLAM方法/数据集/传感器融合/路径规划与仿真多个主题(下)
-
发表了文章
2023-02-20
最新导航综述!SLAM方法/数据集/传感器融合/路径规划与仿真多个主题(上)
-
发表了文章
2023-02-04
高精地图落地 | InstaGraM:实时端到端矢量化高精地图新SOTA!
-
发表了文章
2023-02-04
首篇BEV感知生成工作!BEVGen:从鸟瞰图布局生成环视街景图像
-
发表了文章
2023-02-04
TPAMI 2022 | 视觉transformer最新调研!(下)
-
发表了文章
2023-02-04
TPAMI 2022 | 视觉transformer最新调研!(上)
-
发表了文章
2023-02-04
3D车道线检测能否成为自动驾驶的核心?盘一盘近三年的SOTA论文!(下)
-
发表了文章
2023-02-04
3D车道线检测能否成为自动驾驶的核心?盘一盘近三年的SOTA论文!(上)
-
发表了文章
2023-02-04
最新鱼眼BEV感知 | FPNet:面向泊车场景的失真不敏感多任务算法(TIV 2022)(下)
-
发表了文章
2023-02-04
最新鱼眼BEV感知 | FPNet:面向泊车场景的失真不敏感多任务算法(TIV 2022)(上)
-
发表了文章
2023-02-04
实时部署!DSVT:3D动态稀疏体素Transformer主干(北大&华为)
-
发表了文章
2023-02-04
V2X会是未来趋势吗?看看这种轻量级方法,大幅降低碰撞概率!
滑动查看更多
暂无更多信息
暂无更多信息