图(Graph)的基本概念
图(Graph)是一种比线性表和树更为复杂的非线性(多对多)数据结构。图中元素的关系是任意的,每个元素(也称为顶点)具有多个直接前驱和后继,所以图可以表达数据元素之间广泛存在着的更加复杂的关系。
图(Graph):图$G$由顶点集$V(G)$和边集$E(G)$组成,形式上记为$G = (V, E)$。其中,$V(G)$是顶点(Vertex)的非空有限集合;$E(G)$是$V(G)$中任意两个顶点之间的关系集合,又称为边(Edge)的有限集合。
图的基本术语
有向图:当图G中的每条边有方向时,则称G为有向图。
- 有向边(弧) 有向边通常用两个顶点组成的有序对来表示,又称为弧
- 弧尾:弧的起始结点称为弧尾
- 弧头:弧的终止结点称为弧头
- 一个有向图,其顶点数$v$和边数$e$满足$0 \le e \le v(v - 1)$
- 完全有向图:如果$e = v(v - 1)$时,则称该有向图为完全有向图
- 有向边(弧) 有向边通常用两个顶点组成的有序对来表示,又称为弧
无向图:图G中每条边是无方向的,称为无向图。无向图的两个顶点之间最多只存在一条边。
- 一个无向图,其顶点数$v$和边数$e$满足$0 \le e \le \frac{v(v - 1)}{2}$
- 完全无向图:如果$e = \frac{v(v - 1)}{2}$时,则称该无向图为完全无向图
稀疏图与稠密图:若图G的顶点与边的关系满足$e < vlog_2v$,则该图为稀疏图,否则为稠密图。
- 顶点的度(degree):顶点的度是指依附于某顶点v的边数,通常记作$TD(v)$
- 入度:顶点v的入度是指以顶点为终点的弧的数目,记作$ID(v)$
- 出度:顶点v的出度是指以顶点为起点的弧的数目,记作$OD(v)$
- $TD(v) = ID(v) + OD(v)$
- 边的权、网图:
- 权(weight):与边有关的数据信息称为权,在实际应用中,权值可以有某种含义。
- 网图或网络(network):边上带权的图称为网图或网络。
- 有向带权图:如果边是有方向的带权图,称为有向带权图。
- 路径(path):若从顶点$v_1$出发,沿着一些边经过顶点$v_1, v_2, \cdots, v_{n - 1}$到达顶点$v_n$,则称顶点序列$(v_1, v_2, \cdots, v_{n - 1}, v_n)$为从$v_1$到$v_n$的一条路径。
- 路径长度:沿路径经过的边数称为该路径的长度。
- 简单路径:若路径中的顶点不重复出现,则称这条路径为简单路径。
- 简单回路(简单环):起点和终点相同并且路径长度不小于2的简单路径,被称为简单路径或简单环。
- 有根图:在一个有向图中,若存在一个顶点v,从该顶点可到达图中其他所有的顶点,则称这个有向图为有根图,v称为该图的根。
- 子图:对于图$G = (V, E), G' = (V', E')$,若存在$V' \in V, E' \in E$,则称图$G'$是图$G$的一个子图。
- 连通:
- 无向图:
- 连通:在无向图G中,如果顶点$v_i$和$v_j(i \ne j)$存在路径,则称$v_i$和$v_j$是连通的
- 连通图:如果V(G)中任意两个顶点都连通,则称G为连通图,否则为非连通图。
- 连通分量:无向图G中的极大连通子图称为连通分量。对任何连通图而言,连通分量就是其自身;非连通图可有多个连通分量。
- 有向图:
- 强连通:在有向图G中,如果顶点$v_i$和$v_j(i \ne j)$存在路径,则称$v_i$和$v_j$是强连通的
- 强连通图:如果V(G)中任意两个顶点都强连通,则称G为强连通图,否则为非连通图。
- 强连通分量:有向图G中的极大强连通子图称为强连通分量。
图的存储方法
邻接矩阵(边多)
邻接矩阵是指用一个一维数组存储图中的顶点信息,用一个二维数组存储图中的边信息(即各顶点之间的邻接关系),存储顶点之间邻接关系的二维数组称为邻接矩阵。
结点数为n的图$G = (V, E)$的邻接矩阵$A$是$n \times n$的。将G的顶点编号为$v_1, v_2, \cdots, v_n$。若$(v_i, v_j) \in E$,则$A[i][j] = 1$,否则$A[i][j] = 0$
$$ \begin{equation} A[i][j] = \left\{ \begin{array}{rr} 1 & 若(v_i, v_j)或 \in E(G) \\ 0 & 若(v_i, v_j)或 \notin E(G) \end{array} \right. \end{equation} $$
对于带权图,若顶点$v_i$和$v_j$之间有边相连,则邻接矩阵中对应项存放着该边对应的权值,对于不相连的顶点,则用$\infty$代表两个顶点之间不存在边。
$$ \begin{equation} A[i][j] = \left\{ \begin{array}{rr} w_{ij} & 若(v_i, v_j)或 \in E(G) \\ 0或\infty & 若(v_i, v_j)或 \notin E(G) \end{array} \right. \end{equation} $$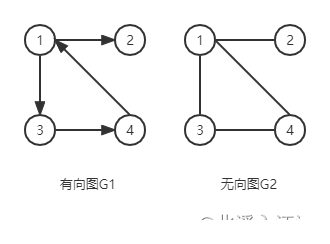
上图的两个图对应的邻接矩阵分别为:
$$ A_1 = \begin{bmatrix} 0 & 1 & 1 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 1 & 0 & 0 & 0 \end{bmatrix}, A_2 = \begin{bmatrix} 0 & 1 & 1 & 1 \\ 1 & 0 & 0 & 0 \\ 1 & 0 & 0 & 1 \\ 1 & 0 & 1 & 0 \end{bmatrix} $$邻接矩阵的特点
根据图的邻接矩阵的存储方法,易知图有以下特点:
- 无向图:
- 无向图的邻接矩阵一定是一个对称矩阵。因此,在具体存放无向图邻接矩阵时只需考虑存放上(下)三角矩阵的元素即可。
- 对于无向图,邻接矩阵第$i$行(或第$i$列)非零元素(或非$\infty$元素)的个数正好是第$i$个顶点的度$TD(v_i)$
- 对于有向图,邻接矩阵第$i$行(或第$i$列)非零元素(或非$\infty$元素)的个数正好是第$i$个顶点的出度$OD(v_i)$(或入度$ID(v_i)$)
- 用邻接矩阵方式存储图,很容易确定图中任意两个元素之间是否相连;但是,要确定图中有多少条边,则必须按行、按列对每个元素进行检测,所花费的实际代价较大。
邻接矩阵结点类型描述
```C
// 最大顶多数define MAX_VERTEX_NUM 20
// VertexType:顶点类型,EdgeType:边类型
typedef char VertexType;
typedef int EdgeType;
typedef struct {
VertexType vertex[MAX_VERTEX_NUM];
EdgeType edges[MAX_VERTEX_NUM][MAX_VERTEX_NUM];
} MatrixGraph;
### 创建邻接矩阵
```C
/**
* 创建无向图的邻接矩阵
* @param graph
* @param edgesNum 无向图边的个数
*/
void CreateUndirectedMatrixGraph(MatrixGraph *graph, int edgesNum) {
int i, j;
float weight;
// 读入无向图顶点信息
for (i = 0; i < MAX_VERTEX_NUM; ++i) {
printf("Please enter the %dth vertex information:", i + 1);
graph->vertex[i] = getchar();
printf("\n");
// 邻接矩阵初始化
for (j = 0; j < MAX_VERTEX_NUM; ++j) {
graph->edges[i][j] = 0;
}
}
// 读入边的权值信息
for (int k = 0; k < MAX_VERTEX_NUM; ++k) {
printf("Please enter the weight information "
"of vertices I to j (starting from subscript 0, "
"enter i, j, weight, separated by Spaces):");
scanf("%d %d %f", &i, &j, &weight);
printf("\n");
graph->edges[i][j] = weight;
graph->edges[j][i] = weight;
}
}
上述算法的时间复杂度为$O(n + n^2 + 3)$,通常情况下$e \ll n^2$,所以该算法的时间复杂度为$O(n^2)$
邻接表(顶点多)
邻接表存储方法是一种顺序存储与链式存储相结合的存储方法。在这种方法中,只考虑非零元素。所以当图中的顶点很多而边很少时,可以有效的节省存储空间。
邻接表存储结构由顶点表和邻接链表两部分组成。
对于每个顶点$v_i$,使用一个具有两个域的结构体数组来存储,这个数组称为顶点表。其中,一个域称为顶点域(Vertex),用来存放顶点本身的数据信息;另一个域称为指针域,用来存放依附于该顶点的边所组成的单链表的表头结点的存储位置。
邻接于$v_i$的顶点$v_j$链接成的单链表称为$v_i$的邻接链表。邻接链表中每个结点由两个域构成,一个是邻接点域(Adjvex),用来存放与$v_i$相邻接的顶点$v_j$的序号$j$(可以是顶点$v_j$在顶点表中所占数组单元的下标);二是链域(Next),用来将邻接链表中的结点链接在一起。
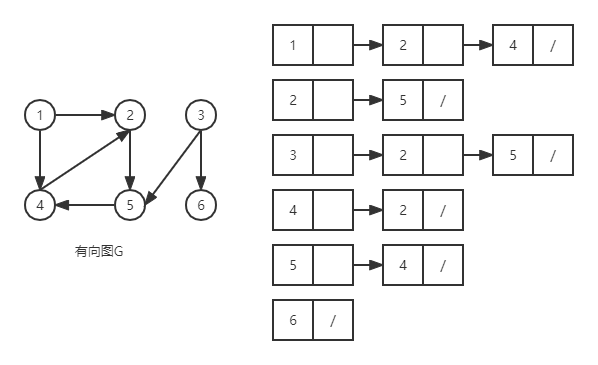
对于无向图,$v_i$的每个结点都对应与$v_i$相关联的一条边,所以无向图的邻接链表又称为边表;对于有向图,$v_i$的邻接链表中每个结点都对应于以$v_i$为起点射出去的一条边,所以有向图的邻接链表又称为出边表。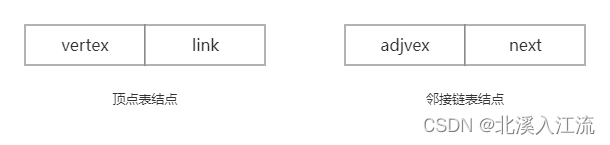
无向图和有向图的示例分别如下图所示: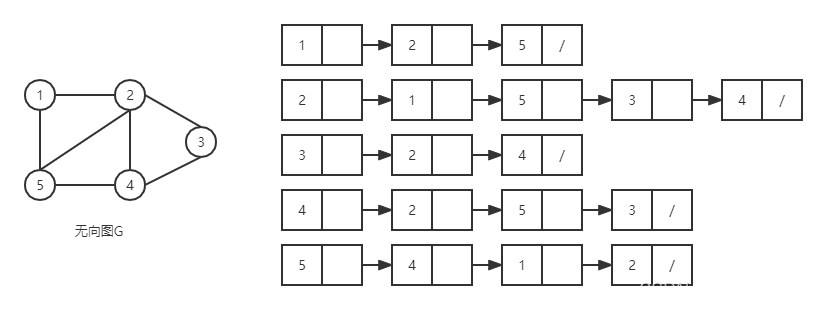
邻接表的特点
- 若G为无向图,则需存储空间为$O(|V| + 2|E|)$;若G为有向图,则需存储空间为$O(|V| + |E|)$。前者的倍数2是因为在无向图中,每条边在邻接表中出现了两次。
- 对于稀疏图,采用邻接表表示有利于节省存储空间。
- 在邻接表中,给定一顶点,很容易找出它的所有邻边,只需要扫描一遍它的邻接表,花费时间为$O(n)$。但是,要确定两个顶点之间是否有邻边,在邻接矩阵中可以在常数时间内查找到,在邻接表中,需要扫描一遍邻接表查找对应结点。
邻接表结点类型描述
邻接链表:
顶点表:// 邻接链表 typedef struct Node{ // 邻接点域:该弧指向的顶点的位置 int adjvex; // 链域:指向下一条弧指针 struct Node* next; } AdjacencyNode;// 顶点表 typedef struct { // 顶点域:顶点结点信息 VertexType vertex; // 邻接链表:指向第一条依附于该顶点的弧的指针 AdjacencyNode *first; } VertexNode;创建邻接表
上述算法的时间复杂度为:$O(n + e)$/** * 创建无向图的邻接表 * @param graph * @param vertexNum * @param edgeNum */ void CreateUndirectedAdjacencyGraph(VertexNode graph[], int vertexNum, int edgeNum) { int i, j; AdjacencyNode *s; // 顶点表初始化 for (i = 0; i < vertexNum; ++i) { printf("Please enter the %dth vertex information:", i + 1); graph[i].vertex = getchar(); graph[i].first = NULL; printf("\n"); } // 建立边表 for (int k = 0; k < edgeNum; ++k) { printf("Please enter the values of vertices I to j " "(starting with subscript 0, enter I, j, separated by Spaces):"); scanf("%d %d", &i, &j); // 建立i到j的邻接表信息 s = (AdjacencyNode *) malloc(sizeof(AdjacencyNode)); s->adjvex = j; s->next = graph[i].first; graph[i].first = s; // 邻接表无向图是对称的,建立从j到i的邻接表信息 s = (AdjacencyNode *) malloc(sizeof(AdjacencyNode)); s->adjvex = i; s->next = graph[j].first; graph[j].first = s; printf("\n"); } }图的遍历
图在遍历过程中,任意一个结点都有可能与其他顶点相邻接,所以为了避免对同一顶点的重复访问,需要使用一个辅助数组$visited[n]$($n$为顶点数)来对顶点进行标识,如果顶点$i$被访问,则$visited[i]$置1,否则保持0。深度优先搜索遍历(DFS)
图的深度优先搜索遍历(DFS)类似于树的先序遍历,是树先序遍历的推广。
图的深度优先搜索遍历过程是:从图中某一顶点$v_I$出发,访问此结点,并进行标记;然后依次搜索$v_i$的每个邻接点$v_j$,若$v_j$未被访问过,则对$v_j$进行访问和标记;然后依次搜索$v_j$的每个邻接点,若$v_j$的邻接点未被访问过,则访问$v_j$的邻接点,并进行标记;$\cdots$直到图中和$v_i$的所有都被访问为止。若在非连通的情况下,图中还有另一顶点未被访问,则另选图中的另一个未被访问的结点作为出发点,重复上述过程,直到图中所有结点都被访问为止。
深度优先遍历得到的顶点序列称为该图的深度优先搜索遍历序列,又称为DFS序列。邻接矩阵的深度优先搜索遍历算法
对于邻接矩阵的DFS序列,若确定其出发点,邻接点的序号按次序排序进行选择,则邻接矩阵作为存储结构得到的DFS序列是唯一的。
```C
/**- 邻接矩阵的深度优先搜索具体算法
- @param graph 邻接矩阵
- @param v 顶点在邻接矩阵顶点信息表中的数组下标值
- @param visited 访问标记数组
*/
void _DFS(MatrixGraph graph, int v, int visited[]) {
// 访问出发点
printf("%c ", graph.vertex[v]);
// 标记已访问的出发点
visited[v] = 1;
// 搜索v的邻接点
for (int j = 0; j < MAX_VERTEX_NUM; ++j) {
}// 当邻接点vj未被访问,从vj开始进行新一轮的深度优先搜索 if ((0 != graph.edges[v][j]) && (0 == visited[j])) { _DFS(graph, j, visited); }
}
/**
- 深度优先搜索包装算法,保证非连通图也能完全访问
- @param graph
- @param v
*/
void DFS(MatrixGraph graph, int v) {
int visited[MAX_VERTEX_NUM];
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}visited[i] = 0;
// 从0开始遍历,保证所有结点都能被访问到
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}if (0 != visited[i]) { _DFS(graph, v, visited); }
}
```
上述算法的时间复杂度为:$O(n^2)$,空间复杂度为:$O(n)$邻接表的深度优先搜索遍历算法
邻接表的DFS序列不唯一,具体取决于邻接表中边表结点的链接次序
```C
/** - 邻接表的深度优先搜索具体算法
- @param graph 邻接表
- @param v 顶点在邻接表顶点信息表中的数组下标值
- @param visited 访问标记数组
/
void _DFS(VertexNode graph[], int v, int visited[]) {
AdjacencyNode p;
// 访问出发点
printf("%c ", graph[v].vertex);
// 标记已访问的出发点
visited[v] = 1;
p = graph[v].first;
// 搜索v的邻接点
while (NULL != p) {
}if (0 == visited[p->adjvex]) { _DFS(graph, p->adjvex, visited); } p = p->next;
}
/**
- 深度优先搜索包装算法,保证非连通图也能完全访问
- @param graph
- @param v
*/
void DFS(VertexNode graph[], int v) {
int visited[MAX_VERTEX_NUM];
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}visited[i] = 0;
// 从0开始遍历,保证所有结点都能被访问到
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}if (0 != visited[i]) { _DFS(graph, v, visited); }
}
```
上述算法的时间复杂度为:$O(2e + n)$,空间复杂度为:$O(n)$广度优先搜索遍历(BFS)
图的广度优先搜索遍历(BFS)类似于树的层次遍历。
图的广度优先搜索遍历过程是:从图中某一结点$v_i$出发,访问$v_i$;然后依次访问$v_i$的邻接点$v_j$;在所有$v_j$都被访问后,再依次访问$v_j$的邻接点$v_k$,$\cdots$直到图中所有和$v_i$路径连通的顶点都被访问为止。若在非连通的情况下,图中还有另一顶点未被访问,则另选图中的另一个未被访问的结点作为出发点,重复上述过程,直到图中所有结点都被访问为止。
在图的广度优先搜索遍历过程中,先被访问的顶点,其邻接点也先被访问,具有先进先出的特性,所以可以使用一个队列来保存已访问过的顶点。邻接矩阵的广度优先搜索遍历算法
对于邻接矩阵的BFS序列,若确定其出发点,邻接点的序号按次序排序进行选择,则邻接矩阵作为存储结构得到的DFS序列是唯一的。
```C
/** - 零件矩阵的广度优先搜索具体算法
- @param graph 邻接矩阵
- @param v 顶点在邻接矩阵顶点信息表中的数组下标值
- @param visited 访问标记数组
*/
void _BFS(MatrixGraph graph, int v, int visited[]) {
DataType data;
// 辅助队列
SequeenQueue queue;
// 队列初始化
InitQueue(&queue);
// 访问出发点
printf("%c ", graph.vertex[v]);
// 标记出发点
visited[v] = 1;
// 已访问结点入队
EnQueue(&queue, v);
while (!IsQueueEmpty(&queue)) {
}// 队头元素出队 DeQueue(&queue, &data); // 访问其邻接点 for (int j = 0; j < MAX_VERTEX_NUM; ++j) { if ((0 != graph.edges[data][j]) && (0 == visited[j])) { printf("%c ", graph.vertex[j]); visited[j] = 1; EnQueue(&queue, j); } }
}
/**
- 广度优先搜索包装算法,保证非连通图也能完全访问
- @param graph
- @param v
*/
void BFS(MatrixGraph graph, int v) {
int visited[MAX_VERTEX_NUM];
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}visited[i] = 0;
// 从0开始遍历,保证所有结点都能被访问到
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}if (0 != visited[i]) { _BFS(graph, v, visited); }
}
```
上述算法的时间复杂度为:$O(n^2)$,空间复杂度为:$O(n)$邻接表的广度优先搜索遍历算法
邻接表的BFS序列不唯一,具体取决于邻接表中边表结点的链接次序
```C
/** - 邻接表的广度优先搜索具体算法
- @param graph 邻接表
- @param v 顶点在邻接表顶点信息表中的数组下标值
- @param visited 访问标记数组
/
void _BFS(VertexNode graph[], int v, int visited[]) {
AdjacencyNode p;
DataType data;
// 辅助队列
SequeenQueue queue;
// 队列初始化
InitQueue(&queue);
// 访问出发点
printf("%c ", graph[v].vertex);
// 标记出发点
visited[v] = 1;
// 已访问结点入队
EnQueue(&queue, v);
while (!IsQueueEmpty(&queue)) {
}// 队头元素出队 DeQueue(&queue, &data); // 依次访问其邻接链表 p = graph[data].first; while (NULL != p) { if (0 == visited[p->adjvex]) { printf("%c ", graph[v].vertex); visited[p->adjvex] = 1; EnQueue(&queue, p->adjvex); } p = p->next; }
}
/**
- 广度优先搜索包装算法,保证非连通图也能完全访问
- @param graph
- @param v
*/
void BFS(VertexNode graph[], int v) {
int visited[MAX_VERTEX_NUM];
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}visited[i] = 0;
// 从0开始遍历,保证所有结点都能被访问到
for (int i = 0; i < MAX_VERTEX_NUM; ++i) {
}if (0 != visited[i]) { _DFS(graph, v, visited); }
}
```
上述算法的时间复杂度为:$O(2e + n)$,空间复杂度为:$O(n)$
