自动驾驶的核心是解决如何在没有司机参与的情况下自动驱动车辆从A点安全高效的到达B点的问题,那么一套完整的自动驾驶解决方案应该包含路径规划(Route Planing),路线规划(Path Planing),动作决策(Maneuver decision),轨迹规划(Trajectory)四个不同层级的组成部分。
路径规划(Route Planing)主要解决从出发点到目的地的道路连线问题,通常会用到Dijkstra算法、Floyd算法及A*算法等计算一条融合最短时间、最短距离的最优路径,早期主要是用静态规划算法,但是随着交通状况越来越复杂多变,融合实时路况、道路负载、信号灯等数据的动态路径规划算法应用越来越广泛。

路线规划(Path Planing)也就是车道级线路规划,包含了多车道选择,匝道、路口、左转\右转车道、特种专用车道等信息的路径规划。

动作决策(Maneuver decision)包含了车辆行驶过程中的加减速决策、变道、超车决策等动作。核心就是自动驾驶里面的跟驰算法和变道决策算法。

轨迹规划(Trajectory)主要是解决车辆加减速和变道超车过程中的行驶曲线规划,和动作规划的区别是轨迹规划主要考虑车内人员的安全和舒适性,所以在动作规划和执行过程中加入了时间约束。核心算法就是通过各种差值算法构建一个平滑舒适的轨迹曲线。

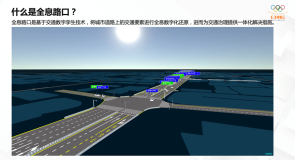
由以上可知,依靠单车的纯视觉只是部分解决了单车场景下动作决策、轨迹规划以及部分微观场景下的线路规划问题,离开车道级高精地图、车道级导航和车路协同技术,在潮汐车道、可变车道、信号灯联网联控逐渐普及的当下,想单靠纯视觉实现L4级自动驾驶是没有可能的。
但是特斯拉走了一条自建高精地图的方案,依靠其最新的视觉融合感知技术,借助每辆特斯拉全车8个摄像头以及强悍的系统算力,车辆可在行驶的同时生成高精度地图。相当于道路上行驶的特斯拉车辆,都是地图测绘车,完全摆脱了第三方高精地图。
对于很多销量不及特斯拉的主机厂来讲,想走特斯拉这条路基本是不可行的。