【CVPR 2018】PIXOR: 点云中三维目标的实时检测
2022-12-29
86
版权
版权声明:
本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《
阿里云开发者社区用户服务协议》和
《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写
侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
简介:

目录
相关文章
|
15天前
|
机器学习/深度学习
存储
算法
基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统【python源码+Pyqt5界面+数据集+训练代码】深度学习实战、目标追踪、运动物体追踪
基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统【python源码+Pyqt5界面+数据集+训练代码】深度学习实战、目标追踪、运动物体追踪
63
0
0
|
1月前
|
传感器
机器学习/深度学习
自动驾驶
【多模态融合】CRN 多视角相机与Radar融合 实现3D检测、目标跟踪、BEV分割 ICCV2023
本文介绍使用雷达与多视角相机融合,实现3D目标检测、3D目标跟踪、道路环境BEV分割,它是来自ICCV2023的。CRN,全称是Camera Radar Net,是一个多视角相机-雷达融合框架。
通过融合多视角相机和雷达的特性,生成语义丰富且空间精确的BEV特征图。实现3D物体检测、跟踪和BEV分割任务。
165
1
1
|
机器学习/深度学习
传感器
编解码
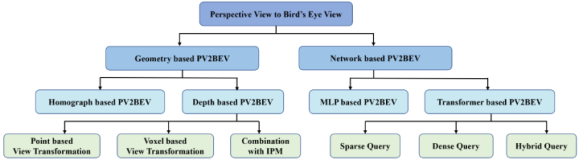
史上最全 | BEV感知算法综述(基于图像/Lidar/多模态数据的3D检测与分割任务)
以视觉为中心的俯视图(BEV)感知最近受到了广泛的关注,因其可以自然地呈现自然场景且对融合更友好。随着深度学习的快速发展,许多新颖的方法尝试解决以视觉为中心的BEV感知,但是目前还缺乏对该领域的综述类文章。本文对以视觉为中心的BEV感知及其扩展的方法进行了全面的综述调研,并提供了深入的分析和结果比较,进一步思考未来可能的研究方向。如下图所示,目前的工作可以根据视角变换分为两大类,即基于几何变换和基于网络变换。前者利用相机的物理原理,以可解释性的方式转换视图。后者则使用神经网络将透视图(PV)投影到BEV上。
2890
0
0
|
计算机视觉
|
机器学习/深度学习
JavaScript
前端开发
|
11月前
|
传感器
存储
编解码
|
12月前
|
安全
知识图谱
|
传感器
人工智能
数据可视化
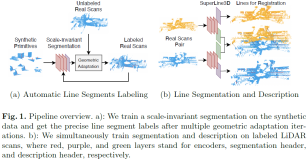
点云配准新方案!SuperLine3D:激光雷达点云中的自监督线分割和描述子提取(ECCV2022)
电线杆和建筑物的轮廓是城市道路上随处可见的物体,可为计算机视觉提供可靠的提示。为了重复提取它们作为特征并在离散的LiDAR帧之间实现关联以进行点云匹配。本文提出了一个用于LiDAR点云中3D线的基于学习的特征分割和描述子模型。
493
0
0
|
机器学习/深度学习
传感器
存储
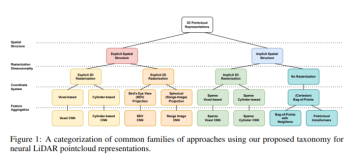
最新综述!分析用于实时车载激光雷达感知的点云深度学习表示(空间结构/光栅化/坐标系)
随着帧速率、点云大小和传感器分辨率的增加,这些点云的实时处理仍必须从车辆环境的这张日益精确的图片中提取语义。在这些点云上运行的深度神经网络性能和准确性的一个决定因素是底层数据表示及其计算方式。本文调查了神经网络中使用的计算表示与其性能特征之间的关系,提出了现代深度神经网络中用于3D点云处理的LiDAR点云表示的新计算分类法。使用这种分类法,对不同的方法家族进行结构化分析,论文揭示了在计算效率、内存需求和表示能力方面的共同优势和局限性,这些都是通过语义分割性能来衡量的。最后,论文为基于神经网络的点云处理方法的未来发展提供了一些见解和指导。
362
0
0
|
传感器
机器学习/深度学习
数据采集
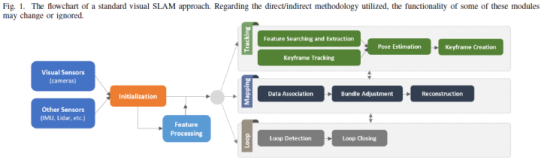
2022最新!视觉SLAM综述(多传感器/姿态估计/动态环境/视觉里程计)(上)
论文调查的主要目的是介绍VSLAM系统的最新进展,并讨论现有的挑战和未来趋势。论文对在VSLAM领域发表的45篇有影响力的论文进行了深入的调查,并根据不同的特点对这些方法进行了分类,包括novelty domain、目标、采用的算法和语义水平。最后论文讨论了当前的趋势和未来的方向,有助于研究人员进行研究。
971
0
0
热门文章
最新文章
1
前端常见兼容问题系列6: 一些安卓APP的WebView中<input type="file">不工作
2
Docker基础之六: Docker基础命令
3
无法初始化SFTP协议。主机是SFTP服务器吗
4
SpringCloud Alibaba
5
MySQL无损复制
6
Redis实战(8)键值和服务器命令
7
C7609之ACL匹配问题
8
教你全面揪出自启动程序
9
ftrace 简介【转】
10
Java, C#, Swift语法对比速查表
1
mysql optimizer_switch : 查询优化器优化策略深入解析
22
2
MySQL Hints:控制查询优化器的选择
13
3
Response响应字符&字节数据
16
4
RedisSearch与Elasticsearch:技术对比与选择指南
18
5
Request请求转发和重定向的资源路径问题,目录到底加不加,取决于浏览器用,还是服务器用,规避项目目录发生修改,导致重定向失败
19
6
机器学习之sklearn基础教程
14
7
基于SpringBoot+Vue的宠物救助管理系统的详细设计和实现(源码+lw+部署文档+讲解等)
13
8
基础正则表达式速查表
11
9
jsonpath :从入门到精通
13
10
Vue如何配置@
15