NRTI/L3_SO2
This dataset provides near real-time high-resolution imagery of atmospheric sulfur dioxide (SO2) concentrations.
Sulphur dioxide (SO2) enters the Earth’s atmosphere through both natural and anthropogenic processes. It plays a role in chemistry on a local and global scale and its impact ranges from short-term pollution to effects on climate. Only about 30% of the emitted SO2 comes from natural sources; the majority is of anthropogenic origin. SO2 emissions adversely affect human health and air quality. SO2 has an effect on climate through radiative forcing, via the formation of sulphate aerosols. Volcanic SO2 emissions can also pose a threat to aviation, along with volcanic ash. S5P/TROPOMI samples the Earth’s surface with a revisit time of one day with unprecedented spatial resolution of 3.5 x 7 km which allows the resolution of fine details including the detection of much smaller SO2 plumes. [More information]
NRTI L3 Product
To make our NRTI L3 products, we use harpconvert to grid the data.
The qa value is adjusted before running harpconvert to satisfy all of the following criteria:
- snow_ice < 0.5
- sulfurdioxide_total_air_mass_factor_polluted > 0.1
- sulfurdioxide_total_vertical_column > -0.001
- qa_value > 0.5
- cloud_fraction_crb < 0.3
- solar_zenith_angle < 60
The 15km SO2 band is ingested only when solar_zenith_angle < 70.
Example harpconvert invocation for one tile:
harpconvert --format hdf5 --hdf5-compression 9 -a 'SO2_column_number_density_validity>50;derive(datetime_stop {time}); bin_spatial(2001, 50.000000, 0.01, 2001, -120.000000, 0.01); keep(SO2_column_number_density,SO2_column_number_density_amf, SO2_slant_column_number_density,cloud_fraction, sensor_altitude, sensor_azimuth_angle, sensor_zenith_angle,solar_azimuth_angle, solar_zenith_angle)' S5P_NRTI_L2__SO2____20190129T101503_20190129T102003_06711_01_010105_20190129T111328.nc output.h5
NRTI/L3_SO2
该数据集提供了大气二氧化硫 (SO2) 浓度的近实时高分辨率图像。
二氧化硫 (SO2) 通过自然和人为过程进入地球大气层。它在地方和全球范围内的化学中发挥作用,其影响范围从短期污染到对气候的影响。只有约 30% 的 SO2 排放来自天然来源;大多数是人为起源的。 SO2 排放对人类健康和空气质量产生不利影响。 SO2 通过形成硫酸盐气溶胶的辐射强迫对气候产生影响。火山二氧化硫排放与火山灰一起也可能对航空构成威胁。 S5P/TROPOMI 以 1 天的重访时间对地球表面进行采样,具有前所未有的 3.5 x 7 公里空间分辨率,可解析精细细节,包括检测更小的 SO2 羽流。 [更多信息]
NRTI L3 产品
为了制作我们的 NRTI L3 产品,我们使用 harpconvert 对数据进行网格化。
在运行 harpconvert 之前调整 qa 值以满足以下所有条件:
雪冰 < 0.5
二氧化硫_total_air_mass_factor_polluted > 0.1
二氧化硫_total_vertical_column > -0.001
qa_value > 0.5
cloud_fraction_crb < 0.3
太阳天顶角 < 60
仅当 solar_zenith_angle < 70 时才会摄取 15 公里 SO2 波段。
Sentinel-5 Precursor
Sentinel-5 Precursor is a satellite launched on 13 October 2017 by the European Space Agency to monitor air pollution. The onboard sensor is frequently referred to as Tropomi (TROPOspheric Monitoring Instrument).
All of the S5P datasets, except CH4, have two versions: Near Real-Time (NRTI) and Offline (OFFL). CH4 is available as OFFL only. The NRTI assets cover a smaller area than the OFFL assets, but appear more quickly after acquisition. The OFFL assets contain data from a single orbit (which, due to half the earth being dark, contains data only for a single hemisphere).
Because of noise on the data, negative vertical column values are often observed in particular over clean regions or for low SO2 emissions. It is recommended not to filter these values except for outliers, i.e. for vertical columns lower than -0.001 mol/m^2.
The original Sentinel 5P Level 2 (L2) data is binned by time, not by latitude/longitude. To make it possible to ingest the data into Earth Engine, each Sentinel 5P L2 product is converted to L3, keeping a single grid per orbit (that is, no aggregation across products is performed).
Source products spanning the antimeridian are ingested as two Earth Engine assets, with suffixes _1 and _2.
The conversion to L3 is done by the harpconvert tool using the bin_spatial operation. The source data is filtered to remove pixels with QA values less than:
- 80% for AER_AI
- 75% for the tropospheric_NO2_column_number_density band of NO2
- 50% for all other datasets except for O3 and SO2
The O3_TCL product is ingested directly (without running harpconvert).
Sentinel-5 Precursor 是欧洲航天局于 2017 年 10 月 13 日发射的一颗卫星,用于监测空气污染。机载传感器通常被称为 Tropomi(对流层监测仪器)。
除 CH4 外,所有 S5P 数据集都有两个版本:近实时 (NRTI) 和离线 (OFFL)。 CH4 仅作为 OFFL 提供。 NRTI 资产覆盖的区域比 OFFL 资产小,但在收购后出现得更快。 OFFL 资产包含来自单个轨道的数据(由于地球有一半是黑暗的,因此仅包含单个半球的数据)。
由于数据上的噪声,通常会观察到负的垂直列值,尤其是在清洁区域或 SO2 排放量较低的情况下。除了离群值外,建议不要过滤这些值,即对于低于 -0.001 mol/m^2 的垂直列。
原始 Sentinel 5P Level 2 (L2) 数据按时间分档,而不是按纬度/经度分档。为了能够将数据摄取到 Earth Engine,每个 Sentinel 5P L2 产品都转换为 L3,每个轨道保持一个网格(即,不执行跨产品的聚合)。
跨越反子午线的源产品作为两个地球引擎资产被摄取,后缀为 _1 和 _2。
到 L3 的转换由 harpconvert 工具使用 bin_spatial 操作完成。过滤源数据以移除 QA 值小于以下值的像素:
AER_AI 80%
NO2 的对流层_NO2_column_number_密度带为 75%
除 O3 和 SO2 外,所有其他数据集为 50%
直接摄取 O3_TCL 产品(不运行 harpconvert)。
Dataset Availability
2018-07-10T11:17:44 - 2021-09-05T00:00:00
Dataset Provider
Collection Snippet
ee.ImageCollection("COPERNICUS/S5P/NRTI/L3_SO2")
Resolution
0.01 degrees
Bands Table
| Name | Description | Min* | Max* | Units |
| SO2_column_number_density | SO2 vertical column density at ground level, calculated using the DOAS technique. | -48 | 0.24 | mol/m^2 |
| SO2_column_number_density_amf | Weighted mean of cloudy and clear air mass factor (amf) weighted by intensity-weighted cloud fraction. | 0.1 | 3.397 | mol/m^2 |
| SO2_slant_column_number_density | SO2 ring corrected slant column number density | -0.147 | 0.162 | mol/m^2 |
| cloud_fraction | Effective cloud fraction. See the [Sentinel 5P L2 Input/Output Data Definition Spec](https://sentinels.copernicus.eu/documents/247904/3119978/Sentinel-5P-Level-2-Input-Output-Data-Definition), p.220. | 0 | 1 | fraction |
| sensor_azimuth_angle | Azimuth angle of the satellite at the ground pixel location (WGS84); angle measured East-of-North. | -180 | 180 | degrees |
| sensor_zenith_angle | Zenith angle of the satellite at the ground pixel location (WGS84); angle measured away from the vertical. | 0.09 | 67 | degrees |
| solar_azimuth_angle | Azimuth angle of the Sun at the ground pixel location (WGS84); angle measured East-of-North. | -180 | 180 | degrees |
| solar_zenith_angle | Zenith angle of the satellite at the ground pixel location (WGS84); angle measured away from the vertical. | 8 | 80 | degrees |
| SO2_column_number_density_15km | SO2 vertical column density at 15km, calculated using the DOAS technique. | mol/m^2 |
* = Values are estimated
影像属性
| Name | Type | Description |
| ALGORITHM_VERSION | String | The algorithm version used in L2 processing. It's separate from the processor (framework) version, to accommodate different release schedules for different products. |
| BUILD_DATE | String | The date, expressed as milliseconds since 1 Jan 1970, when the software used to perform L2 processing was built. |
| HARP_VERSION | Int | The version of the HARP tool used to grid the L2 data into an L3 product. |
| INSTITUTION | String | The institution where data processing from L1 to L2 was performed. |
| L3_PROCESSING_TIME | Int | The date, expressed as milliseconds since 1 Jan 1970, when Google processed the L2 data into L3 using harpconvert. |
| LAT_MAX | Double | The maximum latitude of the asset (degrees). |
| LAT_MIN | Double | The minimum latitude of the asset (degrees). |
| LON_MAX | Double | The maximum longitude of the asset (degrees). |
| LON_MIN | Double | The minimum longitude of the asset (degrees). |
| ORBIT | Int | The orbit number of the satellite when the data was acquired. |
| PLATFORM | String | Name of the platform which acquired the data. |
| PROCESSING_STATUS | String | The processing status of the product on a global level, mainly based on the availability of auxiliary input data. Possible values are "Nominal" and "Degraded". |
| PROCESSOR_VERSION | String | The version of the software used for L2 processing, as a string of the form "major.minor.patch". |
| PRODUCT_ID | String | Id of the L2 product used to generate this asset. |
| PRODUCT_QUALITY | String | Indicator that specifies whether the product quality is degraded or not. Allowed values are "Degraded" and "Nominal". |
| SENSOR | String | Name of the sensor which acquired the data. |
| SPATIAL_RESOLUTION | String | Spatial resolution at nadir. For most products this is `3.5x7km2`, except for `L2__O3__PR`, which uses `28x21km2`, and `L2__CO____` and `L2__CH4___`, which both use `7x7km2`. This attribute originates from the CCI standard. |
| TIME_REFERENCE_DAYS_SINCE_1950 | Int | Days from 1 Jan 1950 to when the data was acquired. |
| TIME_REFERENCE_JULIAN_DAY | Double | The Julian day number when the data was acquired. |
| TRACKING_ID | String | UUID for the L2 product file. |
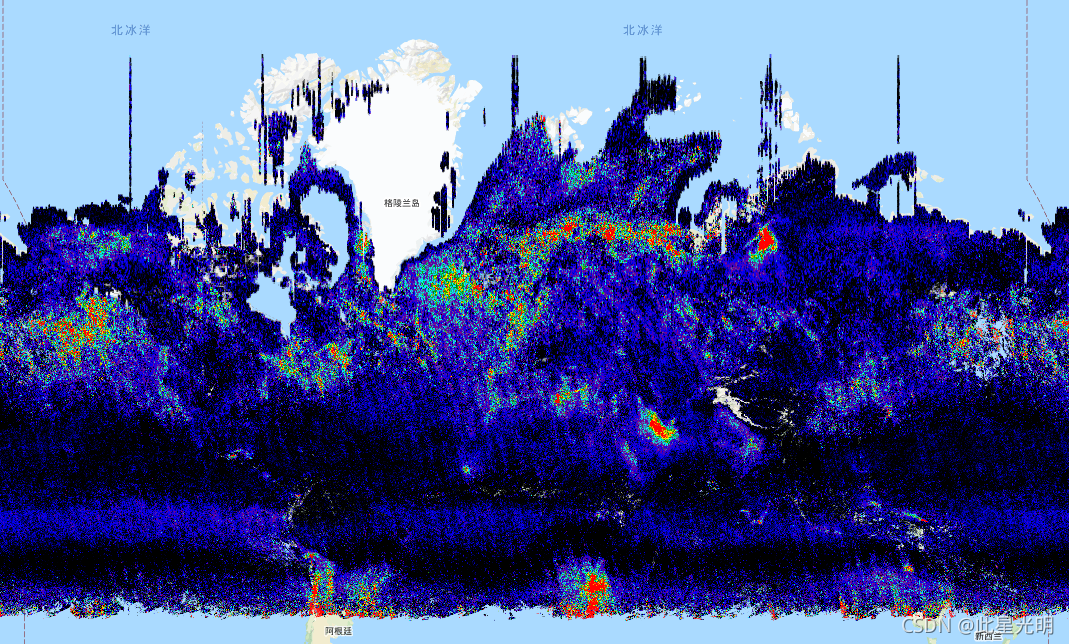
代码:
var collection = ee.ImageCollection('COPERNICUS/S5P/NRTI/L3_SO2') .select('SO2_column_number_density') .filterDate('2019-06-01', '2019-06-11'); var band_viz = { min: 0.0, max: 0.0005, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P SO2'); Map.setCenter(0.0, 0.0, 2);