看到许多小伙伴想进行图像去雨,图像去雾的任务,由于以前进行了此类项目,所以在此书写博客进行交流。
去雨前言
从静止图像中去除雨水是一项复杂且具有挑战性的任务。雨滴仅影响图像的很小区域,因此导致确定应考虑哪个区域和不应考虑哪个区域的混乱。在本文中,已经实现了一种新技术,该技术有效地使用L0梯度最小化方法来去除雨像素。
最小化技术可以全局控制图像中产生多少非零梯度。该方法与局部特征无关,而是全局定位重要边缘。保留了这些显着的边缘,并且减少了低振幅和微不足道的细节。以这种方式去除雨像素。最后,使用直方图调整技术增强了雨水去除的图像的强度,以获得更好的对比度图像。实验结果表明,该算法在去除图像去雨方面有良好的效果。
算法流程

去雨代码部分
clear; close all; I=imread('youwutu.jpg'); %读入图像 R=I(:,:,1);% 取输入图像的R分量 [N1,M1]=size(R); R0=double(R);% 对R分量进行数据转换,并对其取对数 Rlog=log(R0+1); Rfft2=fft2(R0);% 对R分量进行二维傅里叶变换 sigma=250;% 形成高斯滤波函数 F = zeros(N1,M1); for i=1:N1 for j=1:M1 F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma)); end end F=F./(sum(F(:))); Ffft=fft2(double(F)); %对高斯滤波函数进行二维傅里叶变换 DR0=Rfft2.*Ffft; %对R分量与高斯滤波函数进行卷积运算 DR=ifft2(DR0); DRdouble=double(DR); %在对数域中,用原图像减去低通滤波后的图像,得到高频增强图像 DRlog=log(DRdouble+1); Rr=Rlog-DRlog; G=I(:,:,2); % 取输入图像的G分量 [N1,M1]=size(G); G0=double(G); %对G分量进行数据转换,并对其取对数 Glog = log(G0+1); Gfft2=fft2(G0); %对G分量进行二维傅里叶变换 sigma=250; for i=1:N1 for j=1:M1 F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma)); end end F = F./(sum(F(:))); Ffft=fft2(double(F)); %对高斯滤波函数进行二维傅里叶变换 DG0=Gfft2.*Ffft; %对高斯滤波函数进行二维傅里叶变换 DG=ifft2(DG0); DGdouble=double(DG); %在对数域中,用原图像减去低通滤波后的图像,得到高频增强图像 DGlog=log(DGdouble+1); Gg=Glog-DGlog; EXPGg=exp(Gg); %取反对数,得到增强后的图像分量 MIN = min(min(EXPGg)); %对增强后的图像进行对比度拉伸增强 MAX = max(max(EXPGg)); EXPGg = (EXPGg-MIN)/(MAX-MIN); EXPGg=adapthisteq(EXPGg); B=I(:,:,3); %取输入图像的B分量 [N1,M1]=size(B); B0=double(B); %对B分量进行数据转换,并对其取对数 Blog=log(B0+1); Bfft2=fft2(B0); %对B分量进行二维傅里叶变换 sigma=250; %形成高斯滤波函数 for i=1:N1 for j=1:M1 F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma)); end end
去雨结果 matlab 展示




图像去雾
去雾概述
暗通道先验:首先说在绝大多数非天空的局部区域里,某一些像素总会有至少一个颜色通道具有很低的值,也就是说该区域光强是一个很小的值。所以给暗通道下了个数学定义,对于任何输入的图像J,其暗通道可以用下面的公式来表示:图片其中表示彩色图像每个通道,表示以像素X为中心的一个窗口。要求暗通道的图像是比较容易的,先求出每个像素在3个通道的最小值,存到一个二维Mat中(灰度图),然后做一个最小值滤波,滤波的半径由窗口大小决定,这里窗口大小为,公式表示为,其中表示滤波半径。
图片暗通道先验理论得出的结论,这个我不知道如何证明,不过论文给出了几个原因:
a)汽车、建筑物和城市中玻璃窗户的阴影,或者是树叶、树与岩石等自然景观的投影;
b)色彩鲜艳的物体或表面,在RGB的三个通道中有些通道的值很低(比如绿色的草地/树/植物,红色或黄色的花朵/叶子,或者蓝色的水面);;
去雾代码:
计算雾化图像的暗通道
def DarkChannel(img, size=15): """ 暗通道的计算主要分成两个步骤: 1.获取BGR三个通道的最小值 2.以一个窗口做MinFilter ps.这里窗口大小一般为15(radius为7) 获取BGR三个通道的最小值就是遍历整个图像,取最小值即可 """ r, g, b = cv2.split(img) min_img = cv2.min(r, cv2.min(g, b)) kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (size, size)) dc_img = cv2.erode(min_img, kernel) return dc_img
估算全局大气光值
def GetAtmo(img, percent=0.001): """ 1.计算有雾图像的暗通道 2.用一个Node的结构记录暗通道图像每个像素的位置和大小,放入list中 3.对list进行降序排序 4.按暗通道亮度前0.1%(用percent参数指定百分比)的位置,在原始有雾图像中查找最大光强值 """ mean_perpix = np.mean(img, axis=2).reshape(-1) mean_topper = mean_perpix[:int(img.shape[0] * img.shape[1] * percent)] return np.mean(mean_topper)
估算透射率图
def GetTrans(img, atom, w): """ w为去雾程度,一般取0.95 w的值越小,去雾效果越不明显 """ x = img / atom t = 1 - w * DarkChannel(x, 15) return t def GuidedFilter(p, i, r, e): """ :param p: input image :param i: guidance image :param r: radius :param e: regularization :return: filtering output q """ # 1 mean_I = cv2.boxFilter(i, cv2.CV_64F, (r, r)) mean_p = cv2.boxFilter(p, cv2.CV_64F, (r, r)) corr_I = cv2.boxFilter(i * i, cv2.CV_64F, (r, r)) corr_Ip = cv2.boxFilter(i * p, cv2.CV_64F, (r, r)) # 2 var_I = corr_I - mean_I * mean_I cov_Ip = corr_Ip - mean_I * mean_p # 3 a = cov_Ip / (var_I + e) b = mean_p - a * mean_I # 4 mean_a = cv2.boxFilter(a, cv2.CV_64F, (r, r)) mean_b = cv2.boxFilter(b, cv2.CV_64F, (r, r)) # 5 q = mean_a * i + mean_b return q
# 去雾结果 matlab GUI交互展示: 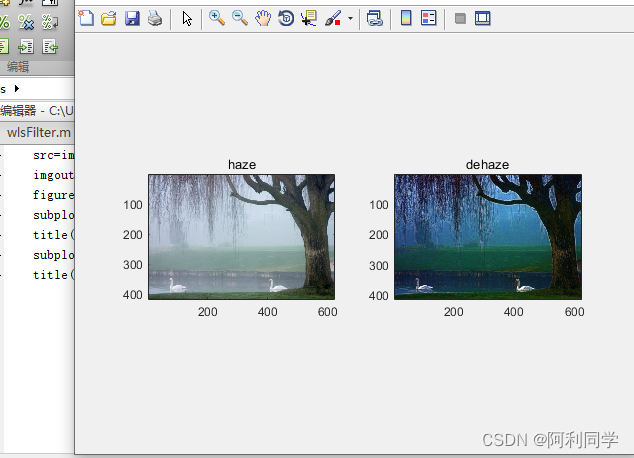 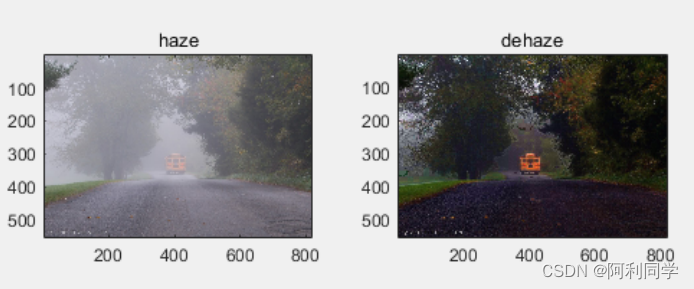 # 结论 **本文只是众多流程的一部分,为目标检测 和其他应用奠定举出。** **通过将所提算法与经典算法进行验证对比,结果表明本文极端环境下的目标 检测与测距方法具有良好的有效性和可行性。 将处理后的图像输送到目标检测和测距模型,提高了目标检测和测距精度,为自动驾驶主动安全行为决策提供必要的技术支持,使得自动驾驶汽车应用在极端环境变得可行。** **若果觉得有用的话,请帮忙点赞,也可以私信交流。** **代码获取**:[全部代码](https://qm.qq.com/cgi-bin/qm/qr?k=-l5P6oI7YkOydUdSszfdHn2qQPBNWfhP&noverify=0&personal_qrcode_source=4)
