目录
自动驾驶领域SAE标准之《道路机动车辆驾驶自动化系统相关术语的分类和定义》官方英文原文翻译与解读
3.1 ACTIVE SAFETY SYSTEM (SAE J3063:NOV2015) 主动安全系统(SAE J3063: 2015年11月)
3.2 AUTOMATED DRIVING SYSTEM (ADS) 自动驾驶系统(ADS)
3.3 ADS-DEDICATED VEHICLE (ADS-DV) ADS-DEDICATED车辆(ADS-DV)
3.5 DRIVING AUTOMATION SYSTEM or TECHNOLOGY 驱动自动化系统或技术
3.6 DRIVING AUTOMATION SYSTEM] FEATURE or APPLICATION 驱动自动化系统特点或应用
3.8 DYNAMIC DRIVING TASK (DDT) 动态驾驶任务
3.9 DYNAMIC DRIVING TASK (DDT)] FALLBACK 动态驾驶任务
3.10 LATERAL VEHICLE MOTION CONTROL 车辆横向运动控制
3.11 LONGITUDINAL VEHICLE MOTION CONTROL
3.12 MINIMAL RISK CONDITION 最小的风险状况
3.13 (DDT PERFORMANCE-RELEVANT) SYSTEM FAILURE (与DDT性能相关的)系统故障
3.15 OBJECT AND EVENT DETECTION AND RESPONSE (OEDR) 对象和事件检测与响应(OEDR)
3.16 OPERATE [A MOTOR VEHICLE] 操作[机动车辆]
3.17 OPERATIONAL DESIGN DOMAIN (ODD) 操作设计域(奇数)
3.18 RECEPTIVITY (OF THE USER) (用户的)接受能力
3.19 REQUEST TO INTERVENE 请求干预
3.20 SUPERVISE (DRIVING AUTOMATION SYSTEM PERFORMANCE) 监督(驾驶自动化系统性能)
3.21 SUSTAINED (OPERATION OF A VEHICLE) 持续(车辆的操作)
相关文章
Paper:自动驾驶领域SAE标准之《道路机动车辆驾驶自动化系统相关术语的分类和定义》官方英文原文翻译与解读(一)
Paper:自动驾驶领域SAE标准之《道路机动车辆驾驶自动化系统相关术语的分类和定义》官方英文原文翻译与解读(二)
自动驾驶领域SAE标准之《道路机动车辆驾驶自动化系统相关术语的分类和定义》官方英文原文翻译与解读
SAE技术标准委员会规定:“本报告由SAE发布,旨在推动技术和工程科学的发展。本报告的使用完全是自愿的,它的适用性和适合于任何特定的使用,包括任何专利侵权引起的,是用户的唯一责任。“SAE至少每五年审核一次每份技术报告,在此期间,报告可能会被修订、重申、稳定或取消。SAE诚邀您的书面评论和建议。
SAE官网:https://www.sae.org/standards/
- J3016™ SEP2016
- 发布2014 - 01
- 修改2016 - 09
- 取代J3016 JAN2014
RATIONALE 基本原理
This Recommended Practice provides a taxonomy describing the full range of levels of driving automation in on-road motor vehicles and includes functional definitions for advanced levels of driving automation and related terms and definitions. This Recommended Practice does not provide specifications, or otherwise impose requirements on, driving automation systems. Standardizing levels of driving automation and supporting terms serves several purposes, including:
|
这个推荐的实践提供了一个分类,描述在道路上的机动车辆的驾驶自动化的全部水平,并包括驾驶自动化的高级水平和相关术语和定义的功能定义。本推荐实践不提供规范,也不要求驱动自动化系统。标准化驾驶自动化水平和支持术语有以下几个目的,包括:
|
These revisions, while substantial, preserve the original SAE J3016:JAN2014 level names, numbers, and functional distinctions, as well as the supporting terms. However, this version of J3016:
|
这些修订虽然内容重大,但保留了SAE J3016: 2014年1月的级别名称、编号、功能区别以及支持条款。然而,这个版本的J3016:
|
1. SCOPE 范围
| This Recommended Practice provides a taxonomy for motor vehicle driving automation systems that perform part or all of the dynamic driving task (DDT) on a sustained basis and that range in level from no driving automation (level 0) to full driving automation (level 5). It provides detailed definitions for these six levels of driving automation in the context of motor vehicles (hereafter also referred to as “vehicle” or “vehicles”) and their operation on roadways. These level definitions, along with additional supporting terms and definitions provided herein, can be used to describe the full range of driving automation features equipped on motor vehicles in a functionally consistent and coherent manner. “On-road” refers to publicly accessible roadways (including parking areas and private campuses that permit public access) that collectively serve users of vehicles of all classes and driving automation levels (including no driving automation), as well as motorcyclists, pedal cyclists, and pedestrians. The levels apply to the driving automation feature(s) that are engaged in any given instance of on-road operation of an equipped vehicle. As such, although a given vehicle may be equipped with a driving automation system that is capable of delivering multiple driving automation features that perform at different levels, the level of driving automation exhibited in any given instance is determined by the feature(s) that are engaged. This document also refers to three primary actors in driving: the (human) driver, the driving automation system, and other vehicle systems and components. These other vehicle systems (or the vehicle in general terms) do not include the driving automation system in this model, even though as a practical matter a driving automation system may actually share hardware and software components with other vehicle systems, such as a processing module(s) or operating code. |
这个推荐的做法提供了一个分类法机动车驾驶自动化系统执行部分或全部的动态驾驶任务(DDT)持续和水平不一,从没有驾驶自动化(0级)完全自动化(要求等级5)。它提供了详细的定义为这六个级别的驾驶自动化的机动车(以下也称为“汽车”或“车辆”)和他们的经营道路。这些级别定义,以及本文提供的其他支持术语和定义,可以用来描述以功能一致和连贯的方式装备在机动车辆上的驾驶自动化功能的全系列。“道路上”是指为各类车辆和驾驶自动化等级(包括无驾驶自动化)以及摩托车、自行车和行人服务的公共通道(包括停车场和允许公众进入的私人校园)。 这些级别适用于驾驶自动驾驶功能(s),参与任何给定实例的道路上操作的装备车辆。因此,尽管给定车辆可能配备了能够提供多种不同级别的驾驶自动化功能的驾驶自动化系统,但在任何给定情况下显示的驾驶自动化水平取决于所涉及的功能。 本文档还提到了驾驶中的三个主要角色:(人)驾驶员、驾驶自动化系统和其他车辆系统和部件。这些其他车辆系统(或车辆统称)不包括驾驶自动化系统在这个模型中,即使作为一个实际问题,驾驶自动化系统实际上可能与其他车辆系统共享硬件和软件组件,如处理模块或操作代码。 |
| The levels of driving automation are defined by reference to the specific role played by each of the three primary actors in performance of the DDT. “Role” in this context refers to the expected role of a given primary actor, based on the design of the driving automation system in question and not necessarily to the actual performance of a given primary actor. For example, a driver who fails to monitor the roadway during engagement of a level 1 adaptive cruise control (ACC) system still has the role of driver, even while s/he is neglecting it. Active safety systems, such as electronic stability control and automated emergency braking, and certain types of driver assistance systems, such as lane keeping assistance, are excluded from the scope of this driving automation taxonomy because they do not perform part or all of the DDT on a sustained basis and, rather, merely provide momentary intervention during potentially hazardous situations. Due to the momentary nature of the actions of active safety systems, their intervention does not change or eliminate the role of the driver in performing part or all of the DDT, and thus are not considered to be driving automation. It should, however, be noted that crash avoidance features, including intervention-type active safety systems, may be included in vehicles equipped with driving automation systems at any level. For ADS-equipped vehicles (i.e., levels 3-5) that perform the complete DDT, crash avoidance capability is part of ADS functionality. |
驾驶自动化的水平是根据三个主要参与者在执行DDT时所扮演的具体角色来定义的。这里的“角色”指的是给定的主要参与者的预期角色,基于所讨论的驱动自动化系统的设计,而不一定是给定的主要参与者的实际性能。例如,在使用1级自适应巡航控制(ACC)系统时,驾驶员未能监控路面情况,即使他/她忽视了这一点,他/她仍然扮演着驾驶员的角色。 主动安全系统,如电子稳定控制和自动紧急制动,和某些类型的驾驶员辅助系统,如车道保持辅助,被排除在这个驾驶自动化分类的范围,因为他们不执行部分或全部的DDT在持续的基础上,相反,只是在有潜在危险的情况下提供的干预。由于主动安全系统行为的短暂性,它们的干预不会改变或消除驾驶员在执行部分或全部DDT的作用,因此不被认为是驾驶自动化。 然而,应该注意的是,防撞功能,包括干预型主动安全系统,可能包括在任何水平上配备驾驶自动化系统的车辆。对于装备了ADS的车辆(如3-5级),执行完整的DDT,碰撞躲避能力是ADS功能的一部分。 |
2. REFERENCES 参考文献
| The following publications form a part of this specification to the extent specified herein. Unless otherwise indicated, the latest issue of SAE publications shall apply. 2.1 Applicable Documents J670 Vehicle Dynamics Terminology (J670:JAN2008). J3063 Active Safety Systems Terms & Definitions (J3063:NOV2015). 49 U.S.C. § 30102(a)(6) (definition of motor vehicle). Gasser, Tom et al. “Legal consequences of an increase in vehicle automation”, July 23, 2013, available at http://bast.opus.hbz-nrw.de/volltexte/2013/723/pdf/Legal_consequences_of_an_increase_in_vehicle_automation.pdf. Michon, J.A., 1985. A CRITICAL VIEW OF DRIVER BEHAVIOR MODELS: WHAT DO WE KNOW, WHAT SHOULD WE DO? In L. Evans & R. C. Schwing (Eds.). Human behavior and traffic safety (pp. 485-520). New York: Plenum Press, 1985. Crash Avoidance Metrics Partnership – Automated Vehicle Research Consortium, “Automated Vehicle Research for Enhanced Safety – Final Report,” (in publication). National Highway Traffic Safety Administration. “Preliminary Statement of Policy Concerning Automated Vehicles,”, May 30, 2013, available at http://www.nhtsa.gov/About+NHTSA/Press+Releases/U.S.+Department+of+Transportation+Releases+ Policy+on+Automated+Vehicle+Development. Smith, Bryant Walker. Engineers and Lawyers Should Speak the Same Robot Language, in ROBOT LAW (2015), available at https://newlypossible.org. |
在本规范规定的范围内,下列出版物构成本规范的一部分。除非另有说明,否则应采用最新一期的SAE出版物。 2.1适用的文件 J670车辆动力学术语(J670: 2008年1月)。 主动安全系统术语和定义(J3063: 2015年11月)。 49 U.S.C.§30102(a)(6)(机动车的定义)。 Gasser, Tom等人,“汽车自动化程度提高的法律后果”,2013年7月23日,http://bast.opus.hbz-nrw.de/volltexte/2013/723/pdf/Legal_consequences_of_an_increase_in_vehicle_automation.pdf。 (J.A。1985。对驾驶员行为模型的批判观点:我们知道什么,我们应该做什么?L. Evans & R. C. Schwing(编)。人类行为与交通安全(第485-520页)。纽约:全会出版社,1985年。 碰撞规避度量伙伴关系-自动车辆研究联盟,“提高安全性的自动车辆研究-最终报告”(已出版)。 国家公路交通安全管理局。“关于自动驾驶汽车政策的初步声明”,2013年5月30日,可在http://www.nhtsa.gov/About+NHTSA/Press+Releases/U.S.+Department+of+Transportation+Releases+政策+on+自动驾驶+车辆+发展。 史密斯,科比沃克。《机器人法》(2015)中,工程师和律师应该使用相同的机器人语言,详见https://newlypossible.org。 |
3. DEFINITIONS 定义
3.1 ACTIVE SAFETY SYSTEM (SAE J3063:NOV2015) 主动安全系统(SAE J3063: 2015年11月)
| Active safety systems are vehicle systems that sense and monitor conditions inside and outside the vehicle for the purpose of identifying perceived present and potential dangers to the vehicle, occupants, and/or other road users, and automatically intervene to help avoid or mitigate potential collisions via various methods, including alerts to the driver, vehicle system adjustments, and/or active control of the vehicle subsystems (brakes, throttle, suspension, etc.). NOTE: For purposes of this report, systems that meet the definition of active safety systems are considered to have a design purpose that is primarily focused on improving safety rather than comfort, convenience or general driver assistance. Active safety systems warn or intervene during a high risk event or maneuver. |
主动安全系统是车辆系统和监控条件下,内部和外部的车辆为目的的确定感知车辆现在和潜在的危险,人,和/或其他道路使用者,并自动进行干预,通过各种方法帮助避免或减轻潜在的碰撞,包括提醒司机,车辆系统调整,和/或车辆的主动控制子系统(刹车,油门、悬架等)。 注:本报告认为,符合主动安全系统定义的系统的设计目的主要是提高安全性,而不是舒适性、便利性或一般的驾驶辅助。主动安全系统在高风险事件或机动时发出警告或进行干预。 |
3.2 AUTOMATED DRIVING SYSTEM (ADS) 自动驾驶系统(ADS)
| The hardware and software that are collectively capable of performing the entire DDT on a sustained basis, regardless of whether it is limited to a specific operational design domain (ODD); this term is used specifically to describe a level 3, 4, or 5 driving automation system. NOTE: In contrast to ADS, the generic term “driving automation system” (see 3.5) refers to any level 1-5 system or feature that performs part or all of the DDT on a sustained basis. Given the similarity between the generic term, “driving automation system,” and the level 3-5-specific term, “Automated Driving System,” the latter term should be capitalized when spelled out and reduced to its acronym, ADS, as much as possible, while the former term should not be. Downloaded from SAE International by Lin Liu, Thursday, November 24, 2016 |
能够持续执行整个DDT的硬件和软件,而不管是否被限制在特定的操作设计领域(ODD);这个术语专门用来描述3级、4级或5级驾驶自动化系统。 注:与ADS不同,通用术语“驾驶自动化系统”(见3.5)是指任何1-5级系统或功能,可持续执行部分或全部的DDT。考虑到通用术语“驾驶自动化系统”和3-5级专用术语“自动驾驶系统”之间的相似性,后者在拼写时应大写,并尽可能简化为其首字母缩写ADS,而前者则不应如此。 2016年11月24日(星期四),刘林从SAE International下载 |
3.3 ADS-DEDICATED VEHICLE (ADS-DV) ADS-DEDICATED车辆(ADS-DV)
| A vehicle designed to be operated exclusively by a level 4 or level 5 ADS for all trips. NOTE 1: An ADS-DV is a truly “driverless” vehicle. However, the term “driverless vehicle” is not used herein because it has been, and continues to be, widely misused to refer to any vehicle equipped with a driving automation system, even if that system is not capable of always performing the entire DDT and thus involves a (human) driver for part of a given trip. This is the only category of ADS-operated vehicle that requires neither a conventional nor remote driver during routine operation. NOTE 2: An ADS-DV might be designed without user interfaces, such as braking, accelerating, steering, and transmission gear selection input devices designed to be operable by a human driver. NOTE 3: A level 4 ADS-DV by design does not operate outside of its ODD (subject to note 4 below). NOTE 4: ADS-DVs might be operated temporarily by a conventional or remote driver: 1) to manage transient deviations from the ODD, 2) to address a system failure or 3) while in a marshalling yard before being dispatched. EXAMPLE 1: A level 4 ADS-DV designed to operate exclusively within a corporate campus where it picks up and discharges passengers along a specific route specified by the ADS-DV dispatcher. EXAMPLE 2: A level 4 ADS-DV designed to operate exclusively within a geographically prescribed central business district where it delivers parts and supplies using roads (but not necessarily routes) specified by the ADS-DV dispatcher. EXAMPLE 3: A level 5 ADS-DV capable of operating on all roads that are navigable by a human driver. The user simply inputs a destination, and the ADS-DV automatically navigates to that destination. |
一种专为4级或5级ADS设计的车辆。 注1:ADS-DV是真正的“无人驾驶”车辆。然而,此处使用的术语“无人驾驶车辆”不是因为它,并继续,广泛滥用指任何车辆配备驾驶自动化系统,即使这系统不能够总是执行整个DDT,因此涉及到(人类)驱动程序给定行程的一部分。这是唯一一类在日常操作中既不需要传统驾驶员也不需要远程驾驶员的ads操作车辆。 注2:ADS-DV的设计可能没有用户界面,如制动、加速、转向和传动齿轮选择输入设备设计为可由人类驾驶员操作。 注3:4级ADS-DV的设计不能在奇数之外运行(参照下面的注释4)。 注4:ADS-DVs可能由传统或远程驱动程序临时操作:1)管理临时偏差,2)处理系统故障,或3)调度前在编组场中。 例1:一个4级ADS-DV专门设计在公司园区内运行,它沿着ADS-DV调度员指定的特定路线载客和卸货。 例2:4级ADS-DV专门设计在地理规定的中央商务区内运行,通过ADS-DV调度员指定的道路(但不一定是路线)运送部件和供应品。 例子3:一个5级ADS-DV能够在所有道路上运行,由人类驾驶员导航。用户只需输入一个目的地,ADS-DV就会自动导航到该目的地。 |
3.4 DRIVING AUTOMATION 驾驶自动化
The performance of part or all of the DDT on a sustained basis. The performance of part or all of the DDT on a sustained basis.
3.5 DRIVING AUTOMATION SYSTEM or TECHNOLOGY 驱动自动化系统或技术
| The hardware and software that are collectively capable of performing part or all of the DDT on a sustained basis; this term is used generically to describe any system capable of level 1-5 driving automation. NOTE: In contrast to this generic term for any level 1-5 system, the specific term for a level 3-5 system is “Automated Driving System (ADS).” Given the similarity between the generic term, “driving automation system,” and the level 3-5-specific term, “Automated Driving System,” the latter term should be capitalized when spelled out and reduced to its acronym, ADS, as much as possible, while the former term should not be. (See 3.2) |
能够持续执行部分或全部DDT的硬件和软件;这个术语一般用于描述任何能够达到1-5级驾驶自动化的系统。 注:与通用的1-5级系统不同,3-5级系统的具体术语是“自动驾驶系统(ADS)”。鉴于通用术语“驾驶自动化系统”(driving automation system)和3-5级专用术语“自动驾驶系统”(Automated driving system)之间的相似性,后者在拼出来时应该大写,并尽可能缩写成ADS,而前者则不应该这样。(见3.2) |
3.6 DRIVING AUTOMATION SYSTEM] FEATURE or APPLICATION 驱动自动化系统特点或应用
| A driving automation system’s design-specific functionality at a specific level of driving automation within a particular ODD. NOTE 1: A given driving automation system may have multiple features, each associated with a particular level of driving automation and ODD. NOTE 2: Each feature satisfies a usage specification. NOTE 3: Features may be referred to by generic names (e.g., automated parking) or by proprietary names. EXAMPLE 1: A level 3 ADS feature that performs the DDT, excluding DDT fallback, in high-volume traffic on fully access-controlled freeways. EXAMPLE 2: A level 4 ADS feature that performs the DDT, including DDT fallback, in a specified geo-fenced urban center. |
一个驱动自动化系统的设计特定的功能,在一个特定的奇内驱动自动化的特定级别。 注1:一个给定的驾驶自动化系统可能有多个特征,每个特征与一个特定的驾驶自动化水平和奇数相关联。 注2:每个特性都满足一个使用规范。 注3:功能可以用通用名称(如自动停车)或专有名称来指代。 例子1:在完全控制访问的高速公路上的高流量交通中,3级广告功能执行DDT(不包括DDT撤退)。 例子2:在特定的地理围栏城市中心,4级ADS功能执行DDT,包括DDT撤退。 |
3.7 DRIVING MODE 驱动方式
| A type of vehicle operation with characteristic DDT requirements (e.g., expressway merging, high-speed cruising, low-speed traffic jam, etc.). NOTE: In the previous version of this document, the term driving mode was used more extensively. In this updated version, operational design domain is the preferred term for many of these uses. |
一种具有DDT特性要求的车辆运行方式(如高速公路并轨、高速巡航、低速堵车等)。 注意:在本文档的前一个版本中,术语驾驶模式被更广泛地使用。在这个更新的版本中,操作设计域是这些用途的首选术语。 |
3.8 DYNAMIC DRIVING TASK (DDT) 动态驾驶任务
| All of the real-time operational and tactical functions required to operate a vehicle in on-road traffic, excluding the strategic functions such as trip scheduling and selection of destinations and waypoints, and including without limitation: 1. Lateral vehicle motion control via steering (operational); 2. Longitudinal vehicle motion control via acceleration and deceleration (operational); 3. Monitoring the driving environment via object and event detection, recognition, classification, and response preparation (operational and tactical) 4. Object and event response execution (operational and tactical); 5. Maneuver planning (tactical); and 6. Enhancing conspicuity via lighting, signaling and gesturing, etc. (tactical). NOTE 1: For simplification and to provide a useful shorthand term, subtasks (3) and (4) are referred to collectively as object and event detection and response (OEDR) (see 3.15). NOTE 2: In this document, reference is made to “complete(ing) the DDT.” This means fully performing all of the subtasks of the DDT, whether by the (human) driver, by the driving automation system, or by both. NOTE 3: Figure 1 displays a schematic view of the driving task. For more information on the differences between operational, tactical, and strategic functions of driving, see 8.4. |
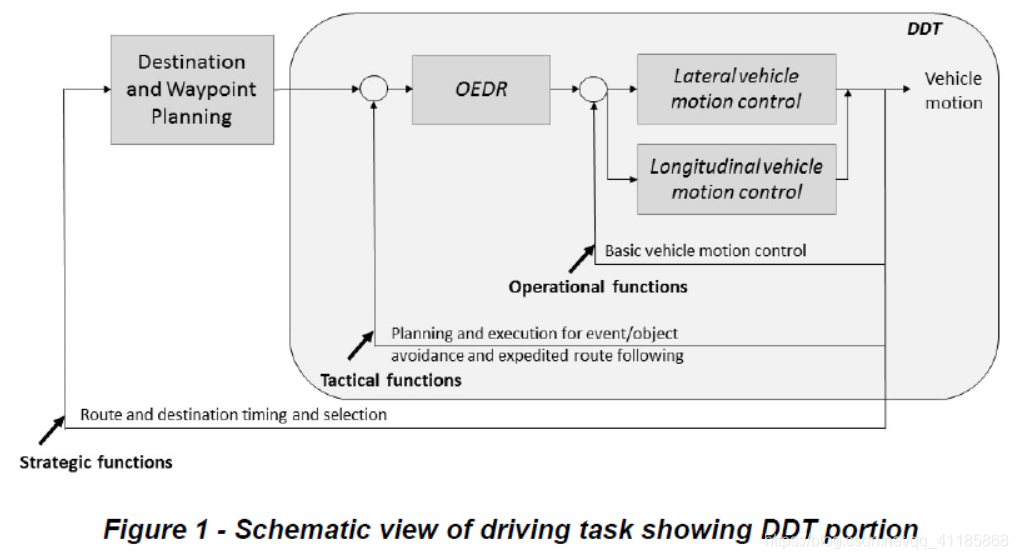
在道路交通中操作车辆所需的所有实时操作和战术功能,不包括战略功能,如旅行计划和目的地和路径点的选择,包括但不限于: 1. 通过转向控制车辆横向运动(操作); 2. 通过加速和减速的纵向车辆运动控制(操作); 3.通过对象和事件检测、识别、分类和响应准备(操作和战术)监控驾驶环境 4. 对象和事件响应执行(操作和战术); 5. 策略规划(战术);和 6. 通过灯光、信号和手势等增强可视性(战术上)。 注1:为了简化和提供一个有用的速记术语,子任务(3)和(4)被统称为对象和事件检测和响应(OEDR)(见3.15)。 注2:在本文件中,参考“完成DDT”。“这意味着完全执行DDT的所有子任务,无论是由(人类)驾驶员、驾驶自动化系统,还是由两者共同完成。 注3:图1显示的是驱动任务示意图。关于驾驶的操作、战术和战略功能的差异的更多信息,见8.4。 |
Figure 1 - Schematic view of driving task showing DDT portion For purposes of DDT performance, level 1 encompasses automation of part of the innermost loop (i.e., either lateral vehicle motion control functionality or longitudinal vehicle motion control functionality and limited OEDR associated with the given axis of vehicle motion control); level 2 encompasses automation of the innermost loop (lateral and longitudinal vehicle motion control and limited OEDR associated with vehicle motion control), and levels 3-5 encompass automation of both inner loops (lateral and longitudinal vehicle motion control and complete OEDR). Note that DDT performance does not include strategic aspects of driving (e.g., determining whether, when and where to travel). |
图1 -显示DDT部分的驾驶任务示意图 为了达到DDT性能的目的,1级包含了部分最内层回路的自动化(即,横向车辆运动控制功能或纵向车辆运动控制功能,以及与给定的车辆运动控制轴相关的有限OEDR);2级包含最内层的自动化回路(横向和纵向车辆运动控制和与车辆运动控制相关的有限OEDR), 3-5级包含两个内层回路的自动化回路(横向和纵向车辆运动控制和完整OEDR)。注意DDT的性能不包括驾驶的战略方面(例如,决定是否、何时和到哪里旅行)。 |
3.9 DYNAMIC DRIVING TASK (DDT)] FALLBACK 动态驾驶任务
| The response by the user or by an ADS to either perform the DDT or achieve a minimal risk condition after occurrence of a DDT performance-relevant system failure(s) or upon ODD exit. NOTE 1: The DDT and the DDT fallback are distinct functions, and the capability to perform one does not necessarily entail the ability to perform the other. Thus, a level 3 ADS, which is capable of performing the entire DDT within its operational design domain (ODD), may not be capable of performing the DDT fallback in all situations that require it and thus will issue a request to intervene to the DDT fallback-ready user when necessary. NOTE 2: At level 3, an ADS is capable of continuing to perform the DDT for at least several seconds after providing the fallback-ready user with a request to intervene. The DDT fallback-ready user is then expected to achieve a minimal risk condition if s/he determines it to be necessary. NOTE 3: At levels 4 and 5, the ADS must be capable of performing the DDT fallback, as well as achieving a minimal risk condition. Level 4 and 5 ADS-equipped vehicles that are designed to also accommodate operation by a driver (whether conventional or remote) may allow a user to perform the DDT fallback if s/he chooses to do so. However, a level 4 or 5 ADS need not be designed to allow a user to perform DDT fallback and, indeed, may be designed to disallow it in order to reduce crash risk (see 8.3). NOTE 4: While a level 4 or 5 ADS is performing the DDT fallback, it may be limited by design in speed and/or range of lateral and/or longitudinal vehicle motion control (i.e., it may enter so-called “limp-home mode”). |
用户或广告的响应,要么执行DDT,要么在DDT性能相关的系统故障发生后或在临时退出时实现最小风险。 注1:DDT和DDT回退是不同的功能,执行其中一项的能力并不一定意味着执行另一项的能力。因此,能够在其操作设计域(ODD)内执行整个DDT的3级ADS,可能无法在所有需要它的情况下执行DDT回退,因此会在必要时向DDT回退准备好的用户发出干预请求。 注2:在第3级,ADS能够在向准备好的后备用户提供干预请求后继续执行DDT至少几秒钟。如果DDT后备用户认为有必要,则应将风险降至最低。 注3:在第4级和第5级时,广告必须有能力执行DDT补救,同时达到最低的风险条件。配备了4级和5级ads的车辆,在设计上也可适应司机的操作(无论是传统的还是远程的),如果用户选择这样做,则可以允许用户执行DDT回退。然而,4级或5级广告不需要设计成允许用户执行DDT回退,实际上,可能设计成不允许这样做,以降低撞车风险(见8.3)。 注4:当4级或5级ADS执行DDT撤退时,它可能会受到速度和/或横向和/或纵向车辆运动控制范围的设计限制(也就是说,它可能会进入所谓的“跛行home模式”)。 |
| EXAMPLE 1: A level 1 adaptive cruise control (ACC) feature experiences a system failure that causes the feature to stop performing its intended function. The human driver performs the DDT fallback by resuming performance of the complete DDT. EXAMPLE 2: A level 3 ADS feature that performs the entire DDT during traffic jams on freeways is not able to do so when it encounters a crash scene and therefore issues a request to intervene to the DDT fallback-ready user. S/he responds by taking over performance of the entire DDT in order to maneuver around the crash scene. (Note that in this example, a minimal risk condition is not needed or achieved.) EXAMPLE 3: A level 4 ADS-dedicated vehicle (ADS-DV) that performs the entire DDT within a geo-fenced city center experiences a DDT performance-relevant system failure. In response, the ADS-DV performs the DDT fallback by turning on the hazard flashers, maneuvering the vehicle to the road shoulder and parking it, before automatically summoning emergency assistance. (Note that in this example, the ADS-DV automatically achieves a minimal risk condition.) |
例1:一个1级自适应巡航控制(ACC)特征经历了系统故障,导致特征停止执行其预期的功能。驾驶员通过恢复完全的DDT执行DDT回退。 例子2:在高速公路上的交通堵塞期间执行整个DDT的3级ADS功能在遇到撞车场景时就不能这么做了,因此它会向DDT备用用户发出干预请求。她/他的反应是接管整个DDT的性能,以操纵坠机现场。(注意,在本例中,不需要或不实现最小风险条件。) 例子3:一辆4级ads专用车辆(ADS-DV)在一个有地理围栏的城市中心执行整个DDT任务时,遭遇了与DDT性能相关的系统故障。作为回应,ADS-DV通过打开危险闪光器,操纵车辆到路肩并停车,然后自动召唤紧急援助,执行DDT撤退。(注意,在这个例子中,ADS-DV自动实现了最小风险条件。) |
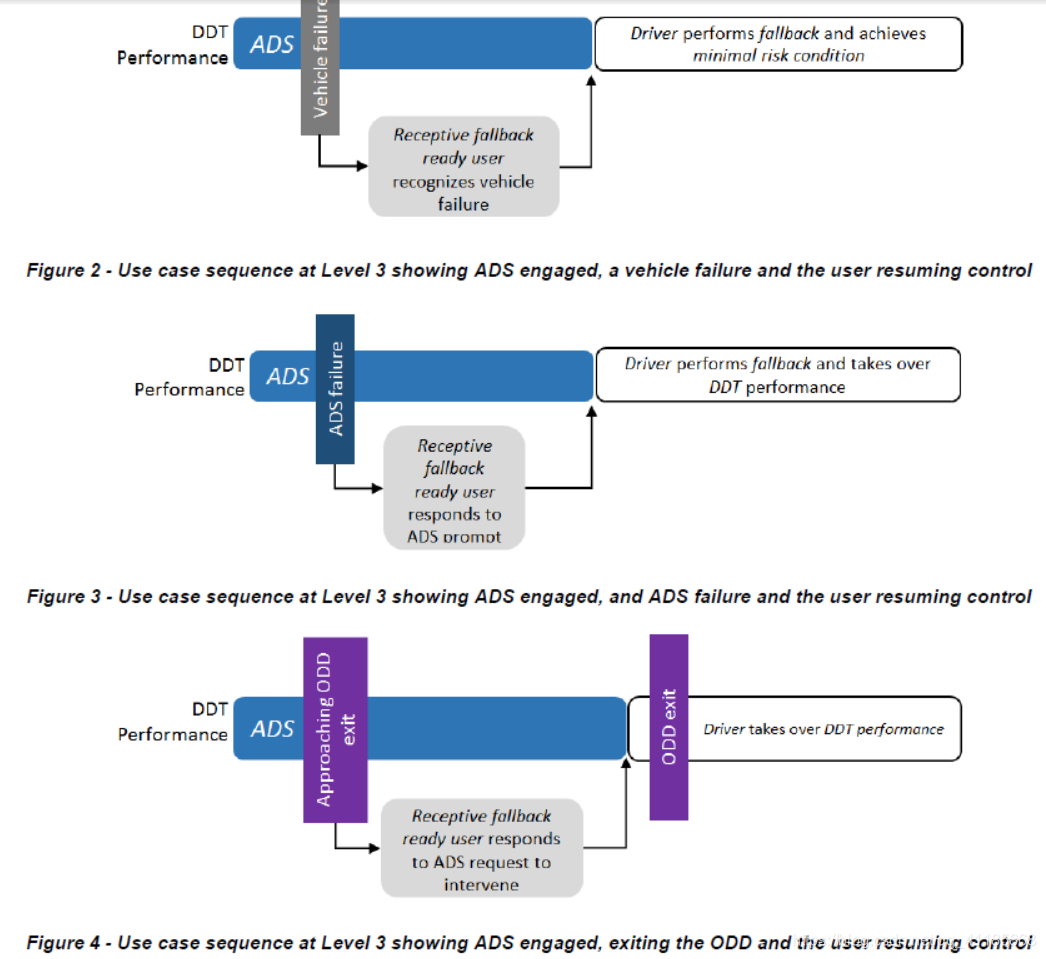
The following Figures 2 through 6 illustrate DDT fallback at various levels of driving automation. Figure 2 - Use case sequence at Level 3 showing ADS engaged, a vehicle failure and the user resuming control Figure 3 - Use case sequence at Level 3 showing ADS engaged, and ADS failure and the user resuming control Figure 4 - Use case sequence at Level 3 showing ADS engaged, exiting the ODD and the user resuming control
|
下面的图2到图6说明了在驾驶自动化的不同级别上DDT的回退。 图2 -第3级的用例序列显示广告已被激活、车辆故障和用户恢复控制 图3 -第3级的用例序列显示广告参与,广告失败和用户恢复控制 图4 -第3级的用例序列显示广告已被占用、退出奇数和用户恢复控制 |
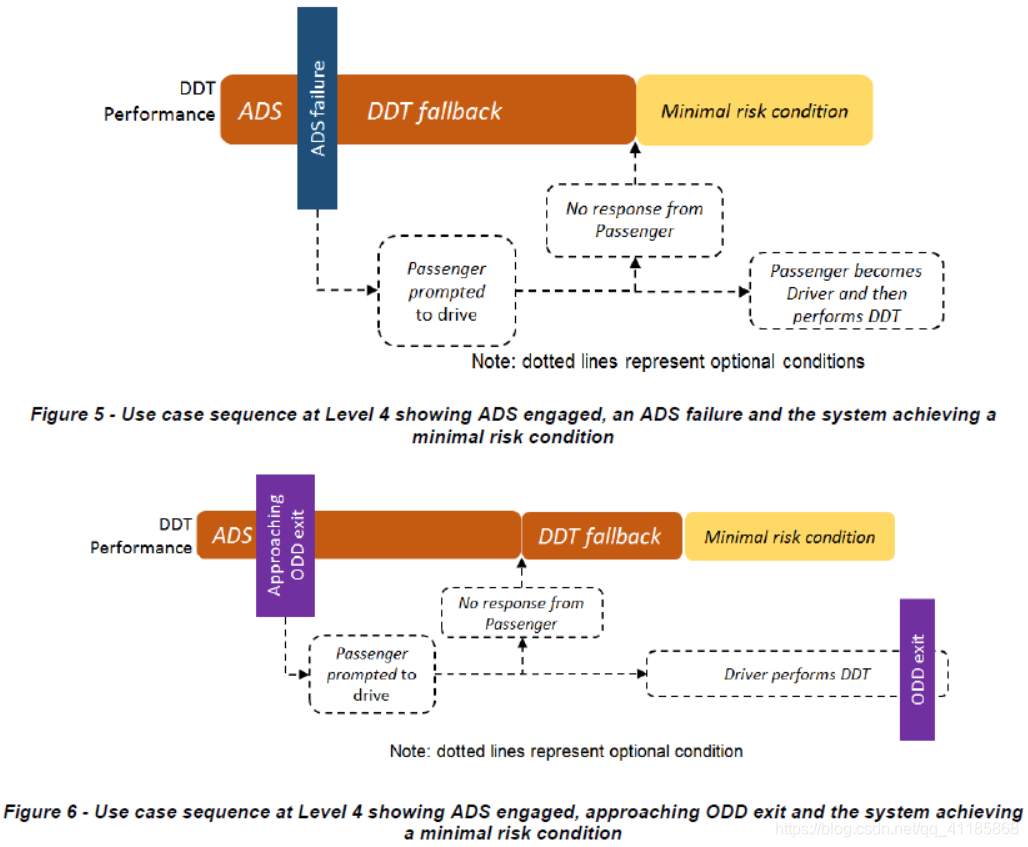
Figure 5 - Use case sequence at Level 4 showing ADS engaged, an ADS failure and the system achieving a minimal risk condition Figure 6 - Use case sequence at Level 4 showing ADS engaged, approaching ODD exit and the system achieving a minimal risk condition
|
图5 -第4级的用例序列显示ADS参与,一个ADS失败和系统实现最小风险条件 图6 -第4级的用例序列显示ADS参与,接近奇数出口,系统达到最小风险条件 |
3.10 LATERAL VEHICLE MOTION CONTROL 车辆横向运动控制
| The DDT subtask comprising the activities necessary for the real-time, sustained regulation of the y-axis component of vehicle motion. NOTE: Lateral vehicle motion control includes the detection of the vehicle positioning relative to lane boundaries and application of steering and/or differential braking inputs to maintain appropriate lateral positioning. |
DDT子任务包括实时、持续调节车辆运动的y轴分量所必需的活动。 注意:横向车辆运动控制包括检测车辆相对于车道边界的定位,以及应用转向和/或差动制动输入来保持适当的横向定位。 |
3.11 LONGITUDINAL VEHICLE MOTION CONTROL
| The DDT subtask comprising the activities necessary for the real-time, sustained regulation of the x-axis component of vehicle motion. NOTE: Longitudinal vehicle motion control includes maintaining set speed as well as detecting a preceding vehicle in the path of the subject vehicle, maintaining an appropriate gap to the preceding vehicle and applying propulsion or braking inputs to cause the vehicle to maintain that speed or gap. |
DDT子任务包括实时、持续调节车辆运动x轴分量所必需的活动。 注意:车辆纵向运动控制包括保持设定的速度,以及在目标车辆的路径上检测前车,与前车保持适当的间隙,并应用推进或制动输入来使车辆保持该速度或间隙。 |
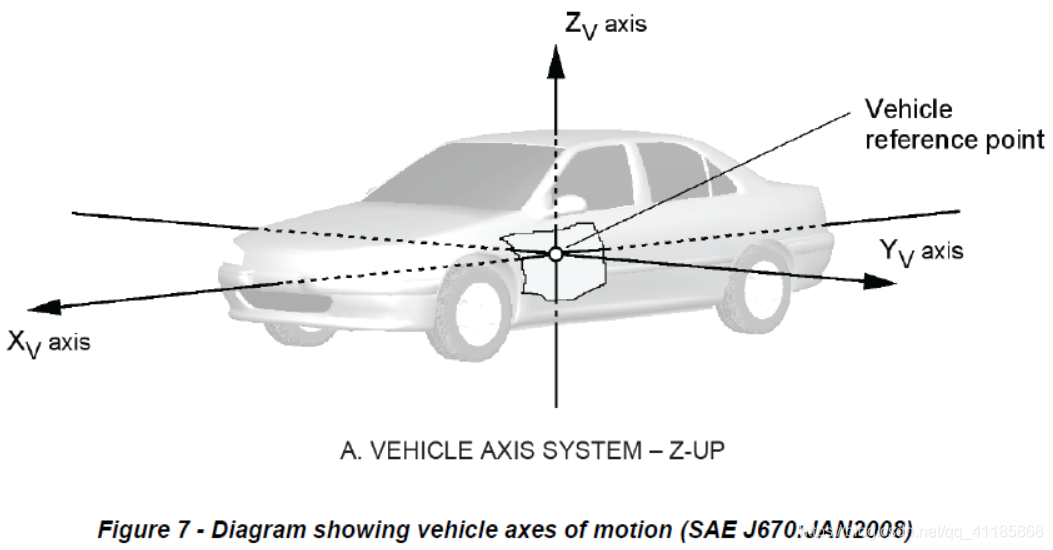
Figure 7 - Diagram showing vehicle axes of motion (SAE J670:JAN2008)
|
图7 -显示车辆运动轴的图表(SAE J670: 2008年1月) |
3.12 MINIMAL RISK CONDITION 最小的风险状况
| A condition to which a user or an ADS may bring a vehicle after performing the DDT fallback in order to reduce the risk of a crash when a given trip cannot or should not be completed. NOTE 1: At levels 1 and 2, the driver may or may not achieve a minimal risk condition in response to a vehicle fault condition or driving automation system failure. NOTE 2: At level 3, given a DDT performance-relevant system failure in the ADS or vehicle, the DDT fallback-ready user is expected to achieve a minimal risk condition when s/he determines that it is necessary. NOTE 3: At levels 4 and 5, the ADS is capable of automatically achieving a minimal risk condition when necessary (i.e., due to ODD exit, if applicable, or a DDT performance-relevant system failure in the ADS or vehicle). The characteristics of automated achievement of a minimal risk condition at levels 4 and 5 will vary according to the type and extent of the system failure, the ODD (if any) for the ADS feature in question, and the particular operating conditions when the system failure or ODD exit occurs. It may entail automatically bringing the vehicle to a stop within its current travel path, or it may entail a more extensive maneuver designed to remove the vehicle from an active lane of traffic and/or to automatically return the vehicle to a dispatching facility. |
用户或广告可以在执DDT补救措施后,将车辆带来,以减少在某一特定旅程不能或不应该完成时发生撞车的风险。 注1:在1级和2级,驾驶员在响应车辆故障或驾驶自动化系统故障时可能达到或不达到最小风险条件。 注2:在第3级,如果在广告或车辆中出现与DDT性能相关的系统故障,则DDT后备用户在认为有必要时,应将风险降到最低。 注3:在级别4和5时,ADS能够在必要时自动达到最低风险条件(例如,由于奇数出口,如果适用,或在ADS或车辆中的DDT性能相关的系统故障)。自动化实现最小风险的特征条件在4和5的水平会有所不同根据系统故障的类型和程度上,广告功能的奇怪的(如果有的话),和特定的操作条件当系统发生故障或奇怪的退出。它可能包括自动将车辆停在其当前行驶路径内,或者可能需要更广泛的机动,旨在将车辆从活跃的交通车道上移开和/或自动将车辆送回调度设施。 |
| EXAMPLE 1: A level 2 driving automation system feature that allows a user to stand outside of the vehicle and initiate an automated parking maneuver via wireless device automatically brings the vehicle to a stop within its current travel path when it experiences a DDT performance-relevant system failure. EXAMPLE 2: A level 4 ADS feature designed to operate a vehicle at high speeds on freeways experiences a DDT performance-relevant system failure and automatically removes the vehicle from the active lane of traffic before coming to a stop. EXAMPLE 3: A level 4 ADS feature designed to operate a vehicle at high speeds on freeways receives a request by a passenger to stop and automatically removes the vehicle from the active lane of traffic before coming to a stop. EXAMPLE 4: A vehicle in which a level 4 ADS is installed experiences a DDT performance-relevant system failure in its primary electrical power system. The ADS utilizes a backup power source in order to achieve a minimal risk condition. |
例子1:一个2级驾驶自动化系统的特性,当遇到与DDT性能相关的系统故障时,用户可以站在车辆外,通过无线设备启动自动停车操作,自动将车辆停在当前行驶路径内。 例子2:设计为在高速公路上高速行驶的车辆的4级ADS功能遭遇了与DDT性能相关的系统故障,并在停车前自动将车辆移出活跃车道。 例子3:一个4级ADS功能设计用于在高速公路上行驶的车辆,它接收到一名乘客的停车请求,并在停车前自动将车辆从活跃车道上移开。 例子4:安装了4级ADS的汽车在主要电力系统中遭遇了与DDT性能相关的系统故障。ADS采用备用电源,以达到最小的风险条件。 |
3.13 (DDT PERFORMANCE-RELEVANT) SYSTEM FAILURE (与DDT性能相关的)系统故障
| A malfunction in a driving automation system and/or other vehicle system that prevents the driving automation system from reliably sustaining DDT performance (partial or complete). NOTE 1: This definition applies to vehicle fault conditions and driving automation system failures that prevent a driving automation system from performing at full capability according to design intention. NOTE 2: This term does not apply to transient lapses in performance by a level 1 or 2 driving automation system that are due to inherent design limitations and that do not otherwise prevent the system from performing its part of the DDT on a sustained basis. |
自动驾驶系统和/或其他车辆系统中的故障,妨碍自动驾驶系统可靠地维持(部分或全部)DDT性能。 注1:此定义适用于车辆故障情况和驾驶自动化系统故障,这些故障导致驾驶自动化系统无法按照设计意图充分发挥作用。 注2:本术语不适用于1级或2级自动驾驶系统由于固有的设计限制而导致的性能暂失,否则无法阻止系统持续执行其部分的DDT。 |
| EXAMPLE 1: A level 1 driving automation system that performs the lateral vehicle motion control subtask of the DDT experiences a DDT performance-relevant system failure in one of its cameras, which prevents it from reliably detecting lane markings. The feature causes a malfunction indication message to be displayed in the center console at the same time that the feature automatically dis-engages, requiring the driver to immediately resume performing the lateral vehicle motion control subtask of the DDT. EXAMPLE 2: A level 3 ADS experiences a DDT performance-relevant system failure in one of its radar sensors, which prevents it from reliably detecting objects in the vehicle’s pathway. The ADS responds by issuing a request to intervene to the DDT fallback-ready user. The ADS continues to perform the DDT, while reducing vehicle speed, for several seconds to allow time for the DDT fallback-ready user to resume operation of the vehicle in an orderly manner. EXAMPLE 3: A vehicle with an engaged level 3 ADS experiences a broken tie rod, which causes the vehicle to handle very poorly giving the fallback-ready user ample kinesthetic feedback indicating a vehicle malfunction necessitating intervention. The fallback-ready user responds by resuming the DDT, turning on the hazard lamps, and pulling the vehicle onto the closest road shoulder, thereby achieving a minimal risk condition. EXAMPLE 4: A level 4 ADS experiences a DDT performance-relevant system failure in one of its computing modules. The ADS transitions to DDT fallback by engaging a redundant computing module(s) to achieve a minimal risk condition. |
例子1:一个一级自动驾驶系统在执行DDT的横向车辆运动控制子任务时,其中一个摄像头出现了与DDT性能相关的系统故障,这使得它无法可靠地检测车道标记。该功能会导致故障指示信息显示在中控台上,同时该功能会自动断开,要求司机立即恢复执行DDT的横向车辆运动控制子任务。 例子2:一个3级ADS的雷达传感器出现了与DDT性能相关的系统故障,这使得它无法可靠地探测到车辆路径上的物体。广告的回应是向DDT后备用户发出干预请求。ADS继续执行DDT,同时降低车速,为DDT后备用户留出时间,以有序地恢复车辆的操作。 例子3:一辆拥有3级ADS的汽车经历了一个断裂的拉杆,这将导致车辆处理得非常糟糕,给准备就绪的用户充足的动觉反馈,表明车辆故障需要进行干预。应急用户的反应是继续使用DDT,打开危险灯,并将车辆拖到最近的路肩,从而实现最小的风险条件。 例子4:一个等级4的ADS在它的一个计算模块中遭遇了与DDT性能相关的系统故障。ADS通过引入冗余计算模块来实现向DDT回退的过渡,以实现最小的风险条件。 |
3.14 MONITOR 监控
| A general term referencing a range of functions involving real-time human or machine sensing and processing of data used to operate a vehicle, or to support its operation. NOTE 1: The terms below describing types of monitoring should be used when the general term “monitor” and its derivatives are insufficiently precise. NOTE 2: The following four terms (1 – monitor the driver, 2 – monitor the driving environment, 3 – monitor vehicle performance, and 4 – monitor driving automation system performance) describe categories of monitoring (see Scope regarding primary actors). NOTE 3: The driver state or condition of being receptive to alerts or other indicators of a DDT performance-relevant system failure, as assumed in level 3, is not a form of monitoring. The difference between receptivity and monitoring is best illustrated by example: A person who becomes aware of a fire alarm or a telephone ringing may not necessarily have been monitoring the fire alarm or the telephone. Likewise, a user who becomes aware of a trailer hitch falling off may not necessarily have been monitoring the trailer hitch. By contrast, a driver in a vehicle with an active level 1 ACC system is expected to monitor the driving environment and the ACC performance and otherwise not to wait for an alert to draw his/her attention to a situation requiring a response. See 3.18 below. |
一种通用术语,指一系列功能,包括用于操纵车辆或支持其操作的人或机器的实时传感和数据处理。 注1:当“监测”及其衍生物的总称不够精确时,应使用以下描述监测类型的术语。 注2:以下四个术语(1 -监控驾驶员,2 -监控驾驶环境,3 -监控车辆性能,4 -监控驾驶自动化系统性能)描述了监控的类别(见主要参与者范围)。 注3:驾驶员状态或状态接受警报或与DDT性能相关的系统故障的其他指标,如3级所假定的,不是一种监测形式。接收能力和监测能力之间的区别可以用一个例子来最好地说明:一个人意识到火灾警报或电话铃声可能并不一定是在监测火灾警报或电话。同样地,如果用户发现一个挂车挂掉了,他也不一定一直在监控挂车挂。相比之下,配备1级主动ACC系统的车辆的驾驶员则需要监控驾驶环境和ACC性能,否则就无需等待警报来吸引他/她对需要响应的情况的注意。请参阅下面的3.18。 |
3.14.1 MONITOR THE USER The activities and/or automated routines designed to assess whether and to what degree the user is performing the role specified for him/her. NOTE 1: User monitoring in the context of driving automation is most likely to be deployed as a countermeasure for misuse or abuse (including over-reliance due to complacency) of a driving automation system, but may also be used for other purposes. NOTE 2: User monitoring is primarily useful for levels 2 and 3, as below these levels evidence from the field has not identified significant incidence of misuse or abuse of driving automation technology, and above these levels the ADS is always capable of achieving a minimal risk condition automatically, so user misuse/abuse is not relevant. |
3.14.1监控用户 设计用来评估用户是否以及在多大程度上执行了为其指定的角色的活动和/或自动化例程。 注1:自动驾驶环境下的用户监控很可能被用于防止驾驶自动化系统的误用或滥用(包括因自满而过度依赖),但也可能用于其他目的。 注2:用户监控主要是用于水平2和3,如下这些领域没有确定的证据水平的发病率显著误用或滥用的驾驶自动化技术,以上这些水平的广告总是能够自动实现最小的风险状况,所以用户误用或滥用是不相关的。 |
3.14.2 MONITOR THE DRIVING ENVIRONMENT The activities and/or automated routines that accomplish real-time roadway environmental object and event detection, recognition, classification, and response preparation (excluding actual response), as needed to operate a vehicle. NOTE: When operating conventional vehicles that are not equipped with an engaged ADS, drivers visually sample the road scene sufficiently to competently perform the DDT while also performing secondary tasks that require short periods of eyes-off-road time (e.g., adjusting cabin comfort settings, scanning road signs, tuning a radio, etc.). Thus, monitoring the driving environment does not necessarily entail continuous eyes-on-road time by the driver. |
3.14.2监控驾驶环境 活动和/或自动化例程,完成实时道路环境对象和事件检测、识别、分类和响应准备(不包括实际响应),根据需要操作车辆。 注意:在驾驶没有安装广告的常规车辆时,驾驶员可以在视觉上对道路场景进行充分的采样,以胜任执行DDT的工作,同时还可以执行需要短时间眼观窗外的次要任务(例如,调整机舱舒适度设置、扫描路牌、调整收音机等)。因此,监控驾驶环境并不一定需要驾驶员持续盯着道路的时间。 |
3.14.3 MONITOR VEHICLE PERFORMANCE (FOR DDT PERFORMANCE-RELEVANT SYSTEM FAILURES) The activities and/or automated routines that accomplish real-time evaluation of the vehicle performance, and response preparation, as needed to operate a vehicle. NOTE: While performing the DDT, level 4 and 5 ADSs monitor vehicle performance. However, for level 3 ADSs, as well as for level 1 and 2 driving automation systems, the human driver is assumed to be receptive to vehicle conditions that adversely affect performance of the DDT (see definition of receptivity at 3.18). EXAMPLE 1: While a level 2 driving automation system is engaged in stop-and-go traffic, a malfunctioning brake caliper causes the vehicle to pull slightly to the left when the brakes are applied. The human driver observes that the vehicle is deviating from its lane and either corrects the vehicle’s lateral position or disengages the driving automation system entirely. EXAMPLE 2: While a level 4 ADS is engaged in stop-and-go traffic, a malfunctioning brake caliper causes the vehicle to pull to the left when the brakes are applied. The ADS recognizes this deviation, corrects the vehicle’s lateral position and transitions to a limp-home mode until the vehicle achieves a minimal risk condition. |
3.14.3监控车辆性能(针对与DDT性能相关的系统故障) 完成车辆性能实时评估和响应准备的活动和/或自动化程序,如操作车辆所需。 注:在执行DDT时,4级和5级ADSs监控车辆的性能。然而,对于3级ADSs,以及1级和2级驾驶自动化系统,人类驾驶员被认为能够接受对DDT性能产生不利影响的车辆条件(见3.18的接受度定义)。 例1:当一个2级自动驾驶系统处于走走停停的交通状态时,一个失灵的制动卡钳导致车辆在刹车时轻微地向左拉。驾驶员观察到车辆偏离车道时,要么纠正车辆的横向位置,要么完全脱离驾驶自动化系统。 例子2:当四级ADS处于走走停停的交通状态时,一个失灵的制动卡钳导致车辆在刹车时向左拉。ADS能够识别这种偏差,纠正车辆的横向位置,并切换到跛置模式,直到车辆达到最小风险状态。 |
3.14.4 MONITOR DRIVING AUTOMATION SYSTEM PERFORMANCE The activities and/or automated routines for evaluating whether the driving automation system is performing part or all of the DDT appropriately. NOTE 1: The term monitor driving automation system performance should not be used in lieu of supervise, which includes both monitoring and responding as needed to perform the DDT and is therefore more comprehensive. NOTE 2: Recognizing requests to intervene issued by a driving automation system is not a form of monitoring driving automation system performance, but rather a form of receptivity. NOTE 3: At levels 1-2, the driver monitors the driving automation system’s performance . NOTE 4: At higher levels of driving automation (levels 3-5), the ADS monitors its own performance of the complete DDT. EXAMPLE 1: A conventional driver verifies that an engaged ACC system is maintaining an appropriate gap while following a preceding vehicle in a curve. EXAMPLE 2: A remote driver engaging a level 2 automated parking feature monitors the pathway of the vehicle to ensure that it is free of pedestrians and obstacles. |
3.14.4监控驾驶自动化系统性能 用于评估驾驶自动化系统是否正确执行部分或全部DDT的活动和/或自动化程序。 注1:术语“监控驾驶自动化系统性能”不能代替“监督”,“监督”包括在执行DDT时的监控和响应,因此更全面。 注2:识别驾驶自动化系统发出的干预请求不是一种监控驾驶自动化系统性能的形式,而是一种接受的形式。 注3:在1-2级,驾驶员监控驾驶自动化系统的性能。 注4:在更高级别的驾驶自动化水平(3-5级),ADS监控自己的完整DDT性能。 例1:一名传统驾驶员验证在弯道上跟随前一辆车时,ACC系统是否保持了适当的间隙。 例2:远程驾驶员使用2级自动停车功能监控车辆的路径,以确保车辆没有行人和障碍物。 |
3.15 OBJECT AND EVENT DETECTION AND RESPONSE (OEDR) 对象和事件检测与响应(OEDR)
| The subtasks of the DDT that include monitoring the driving environment (detecting, recognizing, and classifying objects and events and preparing to respond as needed) and executing an appropriate response to such objects and events (i.e., as needed to complete the DDT and/or DDT fallback). | DDT的子任务包括监测驾驶环境(检测、识别和分类对象和事件,并准备响应)和对这些对象和事件执行适当的响应(如,需要完成DDT和/或DDT回滚)。 |
3.16 OPERATE [A MOTOR VEHICLE] 操作[机动车辆]
| Collectively, the activities performed by a (human) driver (with or without support from one or more level 1 or 2 driving automation features) or by an ADS (level 3-5) to perform the entire DDT for a given vehicle during a trip. NOTE 1: The term “drive” is not used in this document, however, in many cases it could be used correctly in lieu of “operate.” NOTE 2: Although use of the term operate/operating implies the existence of an “operator,” this term is not defined or used in this document, which otherwise provides very specific terms and definitions for the various types of ADS-equipped vehicle users (see 3.24). |
总的来说,是指(人类)司机(有或没有一个或多个1级或2级自动驾驶功能的支持)或ADS(3-5级)在一辆给定车辆的旅程中执行整个DDT的活动。 注1:术语“驱动器”在本文档中没有使用,但是,在很多情况下,它可以正确地代替“操作”。 注2:虽然“操作/操作”一词的使用意味着“操作员”的存在,但本文件并未对该词作出定义或使用,本文件为各种配备ads的车辆用户提供了非常具体的术语和定义(见3.24)。 |
3.17 OPERATIONAL DESIGN DOMAIN (ODD) 操作设计域(奇数)
| The specific conditions under which a given driving automation system or feature thereof is designed to function, including, but not limited to, driving modes. NOTE 1: An ODD may include geographic, roadway, environmental, traffic, speed, and/or temporal limitations. A given ADS may be designed to operate, for example, only within a geographically-defined military base, only under 25 mph, and/or only in daylight. NOTE 2: An ODD may include one or more driving modes. For example, a given ADS may be designed to operate a vehicle only on fully access-controlled freeways and in low-speed traffic, high-speed traffic, or in both of these driving modes. NOTE 3: In the previous version of this document, the term driving mode was used more extensively. In this updated version, ODD is the preferred term for many of these uses. NOTE 4: Section 6 discusses the significance of ODDs in the context of the levels of driving automation. |
给定的驾驶自动化系统或其特征被设计用于工作的特定条件,包括但不限于驾驶模式。 注1:奇数可能包括地理、道路、环境、交通、速度和/或时间限制。例如,一个给定的广告可能被设计成只在地理上定义的军事基地内运行,时速低于25英里,和/或只在白天运行。 注2:奇数可能包括一种或多种驾驶模式。例如,一个给定的ADS可能被设计成只在完全入口控制的高速公路、低速交通、高速交通或这两种驾驶模式下运行车辆。 注3:在本文档的前一版本中,术语驾驶模式被广泛使用。在这个更新的版本中,奇数是这些用法的首选术语。 注4:第6节讨论了在驾驶自动化水平的背景下,概率的重要性。 |
3.18 RECEPTIVITY (OF THE USER) (用户的)接受能力
| An aspect of consciousness characterized by a person’s ability to reliably and appropriately focus his/her attention in response to a stimulus. NOTE 1: In level 0-2 driving automation, the driver is expected to be receptive to evident vehicle system failures, such as a broken tie rod. NOTE 2: In level 3 driving automation, a DDT fallback-ready user is considered to be receptive to a request to intervene and/or to an evident vehicle system failure, whether or not the ADS issues a request to intervene as a result of such a vehicle system failure. NOTE 3: Monitoring includes receptivity. |
意识的一个方面,其特征是一个人在受到刺激时能够可靠地、适当地集中注意力。 注1:在0-2级驾驶自动化中,驾驶员应能接受明显的车辆系统故障,如断裂的拉杆。 注2:在3级驾驶自动化中,DDT后备用户被认为接受干预请求和/或明显的车辆系统故障,无论广告是否发出干预请求作为车辆系统故障的结果。 注3:监测包括接受能力。 |
| EXAMPLE 1: While a level 3 ADS is performing the DDT in stop-and-go traffic, the left-front tie rod breaks. The DDT fallback-ready user feels that the vehicle has pulled dramatically to the left and intervenes in order to move the vehicle onto the road shoulder. EXAMPLE 2: While a level 3 ADS is performing the DDT on a free-flowing highway, the left side mirror glass falls out of the housing. The DDT fallback-ready user, while receptive, does not and is not expected to notice this failure, because it is not apparent. |
例子1:当关卡3的ADS在走走停停的交通中执行DDT时,左前拉杆断了。准备使用DDT的用户认为车辆急剧向左拉,并进行干预,以便将车辆移到路肩上。 例子2:当一个关卡3的ADS在一个自由流动的高速公路上执行DDT时,左侧的镜子玻璃从外壳中掉了出来。DDT备用用户,虽然接受,但不会也不会注意到这个失败,因为它不明显。 |
3.19 REQUEST TO INTERVENE 请求干预
Notification by an ADS to a driver indicating that s/he should promptly perform the DDT fallback. 广告通知司机,指示他/她应立即执行DDT补救措施。
3.20 SUPERVISE (DRIVING AUTOMATION SYSTEM PERFORMANCE) 监督(驾驶自动化系统性能)
| The driver activities, performed while operating a vehicle with an engaged level 1 or 2 driving automation system, to monitor the driving automation system’s performance, respond to inappropriate actions taken by that system, and to otherwise complete the DDT. EXAMPLE: A driver notices that an engaged adaptive cruise control (ACC) system is not maintaining headway to a preceding vehicle in a curve and brakes accordingly. |
驾驶人在驾驶1级或2级自动驾驶系统的车辆时所进行的活动,以监察自动驾驶系统的表现,对该系统采取的不适当行动作出反应,以及完成DDT。 例如:一名司机注意到,一辆自适应巡航控制(ACC)系统在弯道上没有保持前车的车头时距,于是就相应地刹车。 |
3.21 SUSTAINED (OPERATION OF A VEHICLE) 持续(车辆的操作)
| Performance of part or all of the DDT both between and across external events, including responding to external events and continuing performance of part or all of the DDT in the absence of external events. NOTE 1: External events are situations in the driving environment that necessitate a response by a driver or driving automation system (e.g., other vehicles, lane markings, traffic signs). NOTE 2: Sustained performance of part or all of the DDT by a driving automation system changes the user’s role. (See Scope for discussion of roles.) By contrast, an automated intervention that is not sustained according to this definition does not qualify as driving automation. Hence, systems that provide momentary intervention in lateral and/or longitudinal vehicle motion control but do not perform any part of the DDT on a sustained basis (e.g., anti-lock brake systems, electronic stability control, automated emergency braking) are not classifiable (other than at level 0) under the J3016 taxonomy. NOTE 3: Conventional cruise control does not provide sustained operation because it does not respond to external events. It is therefore also not classifiable (other than at level 0) under the J3016 taxonomy. |
在外部事件之间和外部事件之间执行部分或全部DDT,包括对外部事件的响应和在没有外部事件的情况下继续执行部分或全部DDT。 注1:外部事件是驾驶环境中需要司机或驾驶自动化系统作出响应的情况(例如,其他车辆、车道标记、交通标志)。 注2:驾驶自动化系统持续使用部分或全部DDT会改变用户的角色。(请参阅角色讨论的范围。)相比之下,没有按照这一定义持续进行的自动干预就不符合驾驶自动化的标准。因此,在横向和/或纵向车辆运动控制中提供瞬间干预但不执行DDT的任何部分的系统(例如,防抱死制动系统,电子稳定控制,自动紧急制动)不属于J3016分类(0级除外)。 注3:常规巡航控制不能提供持续运行,因为它不能对外部事件作出反应。因此,它也不能按照J3016分类法分类(除了0级)。 |
3.22 TRIP 旅行
| The traversal of an entire travel pathway by a vehicle from the point of origin to a destination. NOTE: Performance of the DDT during a given trip may be accomplished in whole or in part by a driver, driving automation system, or both. |
从起点到终点的整个旅行路径。 注:在给定的行程中,DDT的性能可以由司机或驾驶自动化系统全部或部分完成,或两者同时完成。
|
3.23 USAGE SPECIFICATION 使用规范
| A particular level of driving automation within a particular ODD. EXAMPLE 1: Level 3 driving automation in high-volume traffic on designated fully access-controlled freeways. EXAMPLE 2: Level 4 driving automation in designated urban centers. NOTE 1: Each feature satisfies a usage specification. |
一个特定奇数内的特定级别的驾驶自动化。 例1:在指定的完全入口控制的高速公路上,高流量交通中的3级驾驶自动化。 例子2:指定城市中心的四级驾驶自动化。 注1:每个特性都满足一个使用规范。 |
3.24 (HUMAN) USER 人类 用户
| A general term referencing the human role in driving automation. NOTE 1: The following four terms (1 – driver, 2 – passenger, 3 – DDT fallback-ready user, and 4 - dispatcher) describe categories of (human) users. NOTE 2: These human categories define roles that do not overlap and may be performed in varying sequences during a given trip. |
指的是在驾驶自动化过程中人类所扮演的角色。 注1:以下四个术语(1 -驾驶员,2 -乘客,3 - DDT后备用户和4 -调度员)描述了(人类)用户的类别。 注2:这些人类类别定义的角色不重叠,并且在给定的旅程中可以以不同的顺序执行。 |
3.24.1 DRIVER 司机
| A user who performs in real-time part or all of the DDT and/or DDT fallback for a particular vehicle. NOTE: In a vehicle equipped with a driving automation system, a driver may assume or resume performance of part or all of the DDT from the driving automation system during a given trip. |
对特定车辆实时执行部分或全部DDT和/或DDT回退的用户。 注:在配备自动驾驶系统的车辆中,司机可以在给定的行程中承担或恢复自动驾驶系统的部分或全部DDT的性能。 |
| 3.24.1.1 (CONVENTIONAL) DRIVER A driver who manually exercises in-vehicle braking, accelerating, steering, and transmission gear selection input devices in order to operate a vehicle. NOTE: A conventional driver is assumed to be seated in what is normally referred to as “the driver’s seat” in automotive contexts, which is a unique seating position that makes in-vehicle input devices (steering wheel, brake and accelerator pedals, gear shift) accessible to a (human) driver. |
3.24.1.1(传统)驱动程序 驾驶员为操作车辆而手动操作车辆的刹车、加速、转向和选择传动齿轮输入装置的驾驶员 注意:在汽车领域,传统的驾驶员通常被认为是坐在“驾驶员座位”上,这是一个独特的座位位置,使(人类)驾驶员可以方便地使用车内输入设备(方向盘、刹车、油门踏板、变速杆)。 |
3.24.1.2 REMOTE DRIVER A driver who is not seated in a position to manually exercise in-vehicle braking, accelerating, steering, and transmission gear selection input devices (if any) but is able to operate the vehicle. NOTE 1: A remote driver can include a user who is within the vehicle, within line of sight of the vehicle, or beyond line of sight of the vehicle. NOTE 2: A remote driver is not the same as a dispatcher (see 3.24.4), although a dispatcher may become a remote driver if s/he has the means to operate the vehicle remotely. NOTE 3: A remote driver does not include a person who merely creates driving-relevant conditions that are sensed by, or communicated to, the ADS (e.g., a police officer who announces over a loudspeaker that a particular stop sign should be ignored; another driver who flashes her head lamps to encourage overtaking, or a pedestrian using a DSRC system to announce her presence). EXAMPLE 1: A level 2 automated parking feature allows the remote driver to exit the vehicle near an intended parking space and to cause the vehicle to move into the parking space automatically by pressing and holding a special button on the key fob, while s/he is monitoring the driving environment to ensure that no one and nothing enters the vehicle pathway during the parking maneuver. If, during the maneuver, a dog enters the pathway of the vehicle, the remote driver releases the button on the key fob in order to cause the vehicle to stop automatically. (Note that the remote driver in this level 2 example completes the OEDR subtask of the DDT during the parking maneuver.) EXAMPLE 2: This example is identical to Example 1, except that the remote driver is sitting in the back seat, rather than standing outside the vehicle. EXAMPLE 3: A level 4 closed campus delivery vehicle that has experienced a DDT performance-relevant system failure, which forced it to resort to a minimal risk condition by parking on the side of a campus roadway, is returned to its designated marshalling yard by a remote driver who is able to operate the vehicle using wireless means. |
3.24.1.2远程驱动程序 没有坐到可以手动操作车辆刹车、加速、转向和变速箱选择输入设备(如果有的话)但能够操作车辆的司机。 注1:远程驾驶员可包括在车辆内、在车辆视线范围内或在车辆视线之外的用户。 注2:远程驱动程序与调度员不同(见3.24.4),但如果调度员有能力远程操作车辆,也可以成为远程驱动程序。 注3:远程司机并不包括仅仅根据广告感应或传达广告而制造与驾驶有关的情况的人(例如警察透过扬声器宣布应忽略某一特定的停车标志;另一个司机闪灯鼓励超车,或者一个行人使用DSRC系统宣布她的存在)。 示例1:2级自动停车功能允许远程驱动程序退出一个停车位和附近的车辆导致车辆进入停车场自动按关键fob和举行一个特殊的按钮,当他/她监控驾驶环境,以确保没有人,没有进入停放机动车辆路径。如果在操控过程中,一只狗进入了车辆的通道,远程驾驶员就会松开钥匙链上的按钮,使车辆自动停车。(请注意,在这个级别2的示例中,远程驱动程序在停车操作期间完成了DDT的OEDR子任务。) 例2:这个例子和例1是一样的,除了远程驾驶是坐在后座,而不是站在车外。 示例3:一个四级封闭校园运载工具,经历了DDT performance-relevant系统故障,迫使它诉诸最小风险条件由校园道路停车的返回给其指定的铁路货运编组站通过远程司机能够操作车辆使用无线方式。 |
3.24.2 PASSENGER 乘客
| A user in a vehicle who has no role in the operation of that vehicle. NOTE: A passenger cannot be remote to the vehicle in which s/he is a passenger. EXAMPLE 1: The person seated in the driver’s seat of a vehicle equipped with a level 4 ADS feature designed to automate high-speed vehicle operation on controlled-access freeways is a passenger while this level 4 feature is engaged. This same person, however, is a driver before engaging this level 4 ADS feature and again after disengaging the feature in order to exit the controlled access freeway. EXAMPLE 2: The in-vehicle users of a closed-campus shuttle on a university campus equipped with an engaged level 4 ADS are passengers. EXAMPLE 3: The in-vehicle users of a level 5 ADS-equipped vehicle are passengers whenever the level 5 ADS is engaged. |
在车辆中没有参与车辆操作的使用者。 注意:乘客不能远离其所在的车辆。 例1:在一辆配备了4级ADS功能的汽车上,当这个4级ADS功能被使用时,坐在驾驶员座位上的人是乘客。然而,同一个人在使用第4关卡广告功能之前是一名司机,在为了离开高速公路而退出该功能之后也是如此。 例子2:在大学校园里,一个封闭的校园穿梭车里,配备了一个参与四级广告的乘客。 例子3:装备了5级ADS的车辆的车内用户是乘客,只要5级ADS被使用。 |
3.24.3 (DDT) FALLBACK-READY USER (DDT)备用用户
| The user of a vehicle equipped with an engaged level 3 ADS feature who is able to operate the vehicle and is receptive to ADS-issued requests to intervene and to evident DDT performance-relevant system failures in the vehicle compelling him or her to perform the DDT fallback. NOTE 1: DDT performance by a level 3 ADS assumes that a DDT fallback-ready user is available to perform the DDT as required. There is no such assumption at levels 4 and 5. NOTE 2: A DDT fallback-ready user who transitions to performing part or all of the DDT becomes a driver. NOTE 3: A DDT fallback-ready user may be remote to the ADS-equipped vehicle for which s/he serves as the DDT fallback-ready user. EXAMPLE: A level 3 ADS that is performing the DDT in congested traffic on a freeway encounters emergency responders who are rerouting traffic to the exit due to a serious crash; the ADS issues a request to intervene to the DDT fallback-ready user instructing him or her to resume performing the DDT (i.e., to become a driver). |
配备了3级ADS功能的车辆的用户,能够操作车辆,并能接受ADS发出的干预请求,以及明显的与DDT性能相关的系统故障,迫使他或她执行DDT后备方案。 注1:3级ADS的DDT性能假设一个DDT后备用户可以根据需要执行DDT。在第4级和第5级则没有这样的假设。 注2:切换到执行部分或全部DDT的后备用户成为司机。 注3:DDT后备用户可以远程到其作为DDT后备用户使用的装有ads的车辆。 例子:在高速公路拥堵的交通中执行DDT的3级广告遇到了紧急响应人员,他们由于严重的撞车事故而将交通改道到出口;广告向DDT后备用户发出了干预请求,指示他或她继续执行DDT(即,成为一名司机)。 |
3.24.4 (ADS-EQUIPPED VEHICLE) DISPATCHER (配备ads的车辆)调度员
| A user(s) who verifies the operational readiness of the vehicle and ADS and engages or disengages the ADS. NOTE 1: Unless the destination(s) is pre-programmed in the ADS, a dispatcher may also specify the destination(s). NOTE 2: Only vehicles equipped with a level 4 or 5 ADS designed to operate a vehicle throughout a trip are potentially subject to being dispatched. NOTE 3: Ensuring operational readiness includes such things as ensuring that conspicuity systems are clean and working, maintaining correct tire pressure and fluid levels, as well as ensuring that on-board diagnostic system checks for the vehicle and ADS indicate the absence of a DDT performance-relevant system failure. EXAMPLE: A level 4 closed campus delivery vehicle that has experienced a DDT performance-relevant system failure, which forced it to resort to a minimal risk condition by parking on the side of a campus roadway, is returned to its marshalling yard by a dispatcher who becomes a remote driver and is able to perform the DDT using wireless means. |
验证车辆和广告的运行就绪状态并参与或退出广告的用户。 注1:除非目的地在ADS中被预先编程,dispatcher也可以指定目的地。 注2:只有装备了4级或5级ADS的车辆才有可能被派遣。 注3:确保操作就绪包括确保显著性系统清洁和工作,保持正确的胎压和液面,以及确保车辆和ADS的车载诊断系统检查表明没有DDT性能相关的系统故障。 例子:一个四级封闭校园运载工具,经历了DDT performance-relevant系统故障,迫使它诉诸最小风险条件由校园道路停车的返回给其铁路货运编组站的调度器成为远程驱动和能够执行DDT使用无线方式。 |
3.25 VEHICLE 车辆
| A machine designed to provide conveyance on public streets, roads, and highways. NOTE: As used in this document, vehicle refers to motorized vehicles and excludes those operated only on rail lines. For reference, 49 U.S.C. § 30102(a)(6) defines motor vehicle as follows: “motor vehicle means a vehicle driven or drawn by mechanical power and manufactured primarily for use on public streets, roads, and highways, but does not include a vehicle operated only on a rail line.” |
在公共街道、道路和高速公路上提供运输的机器。 注:本文件所称车辆指机动车辆,不包括仅在铁路上行驶的车辆。参照49 U.S.C.§30102(a)(6)对机动车辆的定义如下:“机动车辆是指主要用于公共街道、道路和高速公路的机械驱动或牵引的车辆,但不包括仅在铁路上运行的车辆。” |