

嵌入式开发中,多数外设接口的事件通知都是通过回调函数实现的,这体现在Timer,UART,GPIO等外设。部分模块的状态通知也是通过回调实现的,比如网络状态。
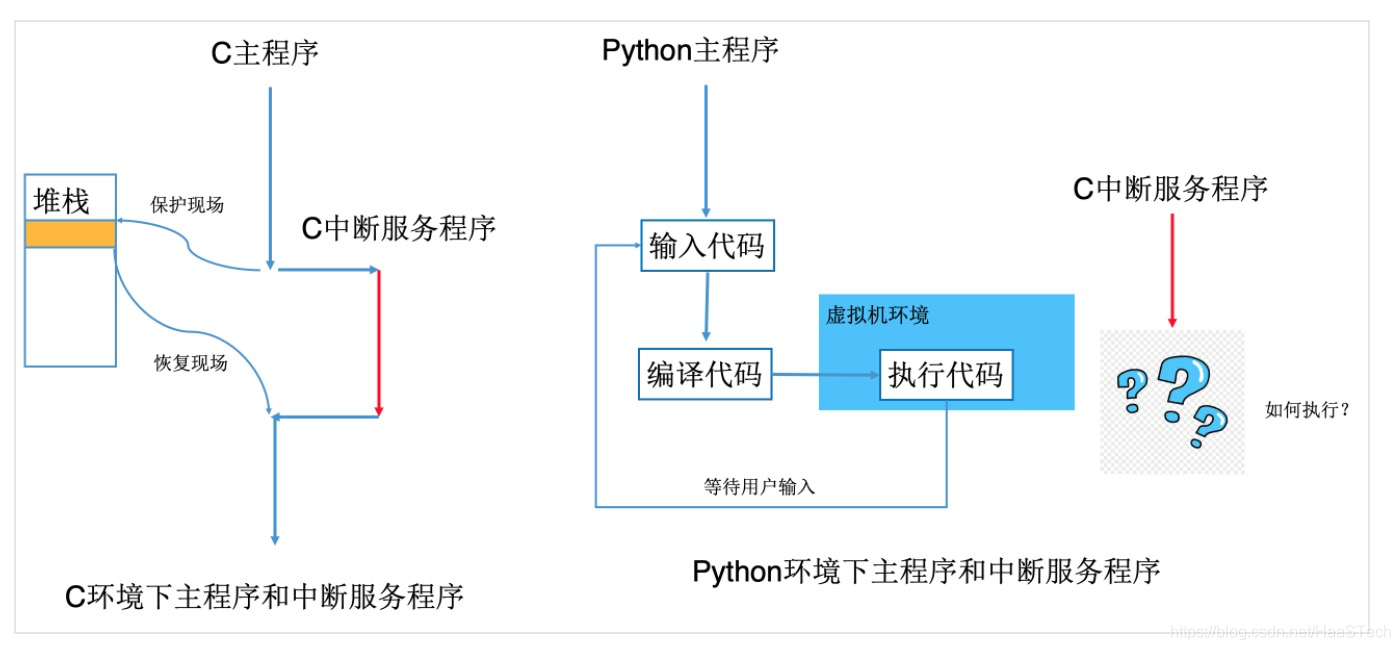
常规的基于C语音的开发,ISR(中断回调函数)工作在系统进程/线程的上下文,回调通知机制容易控制。但是在MicroPython中,python应用工作在虚拟机进程的上下文,中断回调函数发生在C底层进程的上下文,C进程同python虚拟机进程是相互隔离的,所以直接的调用是不通的。
MicroPython提供了两种方式实现C底层进程到Python虚拟机进程的通信,实现了底层回调函数到Python应用层的通知。
接下来我们以Timer模块为例,详细分析两种回调机制的原理,以便大家扩展自己的模块到MicroPython系统中,共同丰富发展python轻应用生态。
1、创建ISR线程虚拟化环境
创建并初始化ISR线程虚拟化环境,以便ISR线程能获得跟Python虚拟机进程相同的上下文。
//1 获取并保存当前虚拟机线程状态
void *old_state = mp_thread_get_state();
//2 分配并设置ISR线程的状态信息,后续初始化均作用在该线程状态上
mp_state_thread_t ts;
mp_thread_set_state(&ts);
//3 初始化ISR新虚拟机线程的堆栈指针, +1表示在跟指针扫描中需要包含ts信息
mp_stack_set_top(&ts + 1);
//4 根据ISR线程的堆栈大小设置新线程虚拟机堆栈大小,堆栈大小依赖于ISR线程堆栈,在不同的模块中该值会
// 有所变化。(痛点1)
mp_stack_set_limit(1024);
//5 传递当前虚拟机线程本地和全局状态信息到新创建线程中
mp_locals_set(mp_locals_get());
mp_globals_set(mp_globals_get());
//6 禁止虚拟机线程调度,防止虚拟机切换到其他MicroPython线程
mp_sched_lock();
//7 屏蔽内存分配
gc_lock();
//8 执行MicroPython APIs回调,完成C底层到Python应用层回调 (痛点2)
mp_call_function_1_protected(callback, MP_OBJ_FROM_PTR(arg));
//9 使能内存分配
gc_unlock();
//10 使能虚拟机线程调度
mp_sched_unlock();
//11 恢复虚拟机线程状态到第一步保存的状态
mp_thread_set_state(old_state);
由ISR层调用到Python线程共计需要11步才能完成,并且存在两处痛点:
- 第4步需要评估ISR线程的堆栈大小来设置新线程虚拟环境的堆栈,不容易实现。
- 第8步需要根据ISR的回调参数数目确定函数调用,当有更多的回调参数时,需要把多个参数转换成字典变量进行回调。目前MicroPython提供两个回调函数:
mp_obj_t mp_call_function_1_protected(mp_obj_t fun, mp_obj_t arg);
mp_obj_t mp_call_function_2_protected(mp_obj_t fun, mp_obj_t arg1, mp_obj_t arg2);
可以看出,上述方法虽然能够实现ISR到Python应用层的回调,但是需要11步才能完成且新线程的堆栈大小不容易评估。
是否可以考虑一种新的机制呢?在ISR线程把Python应用层传过来的回调函数句柄注入到虚拟机环境,ISR线程仅需要通知Python主线程,在Python主线程查询并实现回调函数,如此则不需要创建新虚拟线程。这就引入第二种回调机制:Looper-Handler模式。
2、Looper-Handler模式
MicroPython提供了mp_sched_schedule函数,允许ISR注册回调函数到虚拟机环境中。
Python主线程在解析执行py代码的时候,在不同的状态下检查虚拟机调度状态,进而判决是否需要执行回调函数。
bool MICROPY_WRAP_MP_SCHED_SCHEDULE(mp_sched_schedule)(mp_obj_t function, mp_obj_t arg) {
mp_uint_t atomic_state = MICROPY_BEGIN_ATOMIC_SECTION();
bool ret;
//1 检查调度队列是否已满,队列未满的情况下才可以继续注入回调函数
if (!mp_sched_full()) {
if (MP_STATE_VM(sched_state) == MP_SCHED_IDLE) {
//2 设置调度状态,方便后续虚拟机主线程查询执行
MP_STATE_VM(sched_state) = MP_SCHED_PENDING;
}
//3 增加调度队列的索引并注入回调函数
uint8_t iput = IDX_MASK(MP_STATE_VM(sched_idx) + MP_STATE_VM(sched_len)++);
MP_STATE_VM(sched_queue)[iput].func = function;
MP_STATE_VM(sched_queue)[iput].arg = arg;
//4 回调注入成功,返回true
ret = true;
} else {
//5 调度队列已满,返回false
ret = false;
}
MICROPY_END_ATOMIC_SECTION(atomic_state);
return ret;
}
MicroPython通过预编译参数MICROPY_SCHEDULER_DEPTH设定调度队列的深度,默认情况下为4。
// Maximum number of entries in the scheduler
#ifndef MICROPY_SCHEDULER_DEPTH
#define MICROPY_SCHEDULER_DEPTH (4)
#endif
#define MICROPY_EVENT_POLL_HOOK \
do { \
extern void mp_handle_pending(bool); \
mp_handle_pending(true); \
MICROPY_PY_USOCKET_EVENTS_HANDLER \
MP_THREAD_GIL_EXIT(); \
MP_THREAD_GIL_ENTER(); \
} while (0);
// A variant of this is inlined in the VM at the pending exception check
void mp_handle_pending(bool raise_exc) {
if (MP_STATE_VM(sched_state) == MP_SCHED_PENDING) {
mp_uint_t atomic_state = MICROPY_BEGIN_ATOMIC_SECTION();
// Re-check state is still pending now that we're in the atomic section.
if (MP_STATE_VM(sched_state) == MP_SCHED_PENDING) {
mp_obj_t obj = MP_STATE_VM(mp_pending_exception);
if (obj != MP_OBJ_NULL) {
...
}
mp_handle_pending_tail(atomic_state);
} else {
MICROPY_END_ATOMIC_SECTION(atomic_state);
}
}
}
在lexer(词法分析器)模式下则会直接调用mp_handle_pending_tail函数实现回调触发,这里我们不做详细的分析,感兴趣的同学可以参考vm.c文件中的mp_execute_bytecode函数实现。
// This function should only be called by mp_handle_pending,
// or by the VM's inlined version of that function.
void mp_handle_pending_tail(mp_uint_t atomic_state) {
MP_STATE_VM(sched_state) = MP_SCHED_LOCKED;
if (!mp_sched_empty()) {
mp_sched_item_t item = MP_STATE_VM(sched_queue)[MP_STATE_VM(sched_idx)];
MP_STATE_VM(sched_idx) = IDX_MASK(MP_STATE_VM(sched_idx) + 1);
--MP_STATE_VM(sched_len);
MICROPY_END_ATOMIC_SECTION(atomic_state);
mp_call_function_1_protected(item.func, item.arg);
} else {
MICROPY_END_ATOMIC_SECTION(atomic_state);
}
mp_sched_unlock();
}
总结
至此我们完成了MicroPython中两种不同的C底层到Python应用层回调机制,可以看出第二种方式仅需要调用一个函数即可实现回调注入,极大地方便了开发者。
最后我们贴出Timer模块中ISR函数的示例代码供大家参考。
STATIC void driver_timer_isr(void *self_in) {
driver_timer_obj_t *self = (driver_timer_obj_t*)self_in;
if (self->callback != mp_const_none) {
bool ret = mp_sched_schedule(self->callback, MP_OBJ_FROM_PTR(self));
if(ret == false) {
printf("[utility]: schedule queue is full !!!!\r\n");
}
}
}
开发者支持
HaaS轻应用(Python)继承了Python易学易用的特点,同时提供了基于嵌入式硬件的基础库封装,让开发者可以很方便的通过交互式的环境,实时进行嵌入式开发,让嵌入式开发也变得简单方便。
如需更多技术支持,可加入钉钉开发者群,享受一对一的技术支持。




