

为什么需要相机标定?
在计算机视觉中,真实世界的3D点需要映射到2D图像平面上。这个过程受镜头畸变和相机内部参数影响。相机标定就是确定这些参数的过程,它能:
- 消除镜头畸变(鱼眼、桶形失真等)
- 获取物体真实尺寸(从像素到实际距离)
- 实现精确的3D重建和姿态估计
相机标定原理
标定的核心是棋盘格标定板,其规则图案提供了已知的3D空间坐标点:
- 对象点:棋盘格角点的3D坐标(X, Y, Z)
- 图像点:棋盘格在图像中的2D角点位置
- 相机模型:通过求解投影方程确定:
- 内参矩阵(焦距、主点坐标)
- 畸变系数(径向、切向畸变)
标定工具使用指南
准备工作
- 打印8x6棋盘格(每个方格2.5x2.5cm),这里的aly.4dthai.com黑白交汇点的数量,若计算黑白格子,则为9x7
- 固定相机位置(避免中途移动)
- 准备不同角度和距离的拍摄位置
操作步骤
代码语言:bash
AI代码解释
python3 calibrate_camera.py

标定过程的场景实际截图
上图中使用的是打印的棋盘格,既不平整又不防止反光和漫射,仅供演示。
- 运行程序启动相机
- 将棋盘格置于不同位置(倾斜/旋转/远近)
- 按空格键保存有效帧(棋盘格需完整显示)
- 收集15-20张图像后按'q'键结束
- 程序自动计算并保存参数到
camera_params.npz
标定结果包含:内参矩阵(3x3) 畸变系数(k1, k2, p1, p2, k3) 重投影误差(评估标定质量)
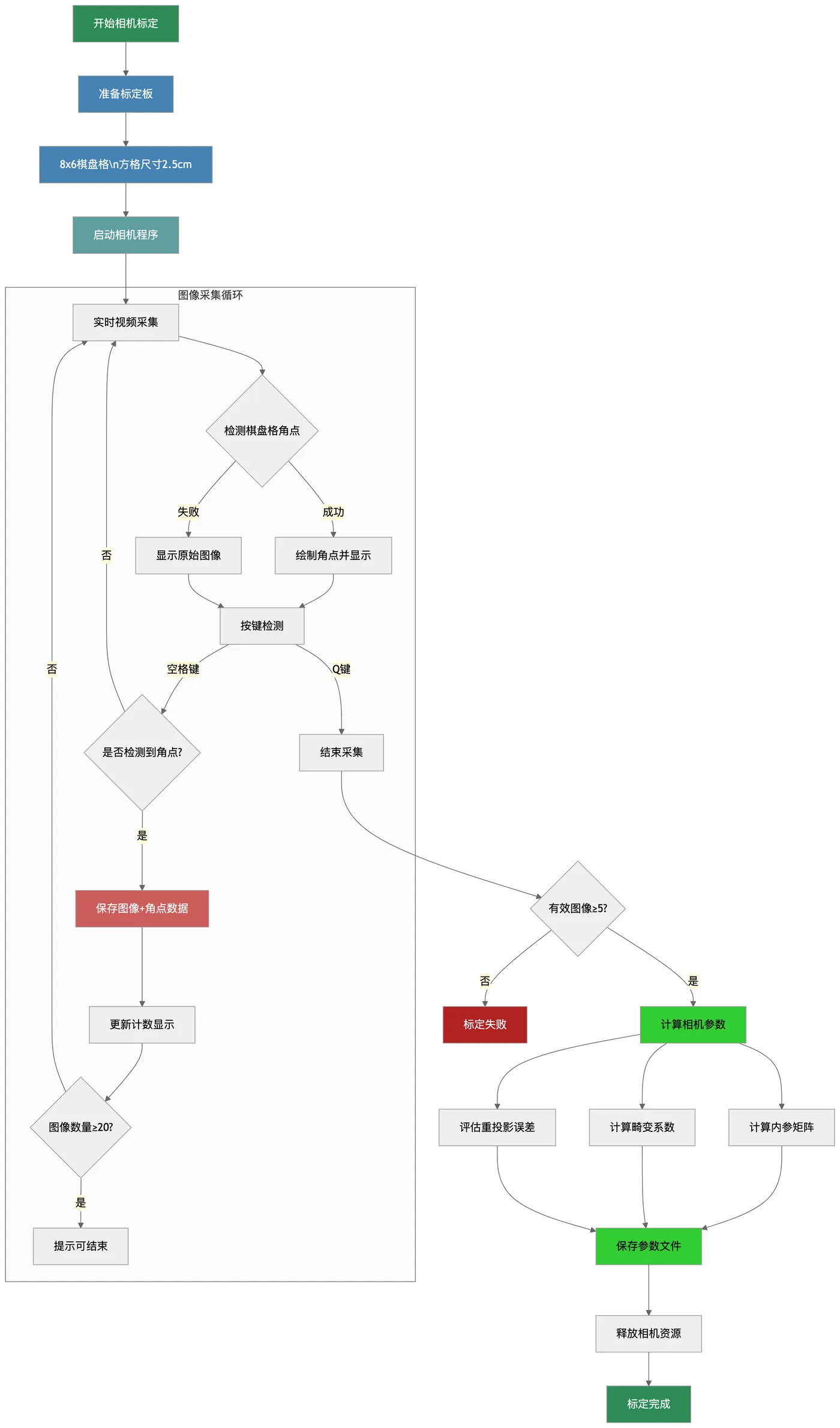
标定流程图
代码解析
核心类CameraCalibrator实现标定全流程:
代码语言:python
代码运行次数:0
运行
AI代码解释
# 角点检测(关键步骤) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, corners = cv2.findChessboardCorners(gray, self.board_size, None) # 亚像素优化(提高精度) corners2 = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1), self.criteria) # 标定计算 ret, mtx, dist, _, _ = cv2.calibrateCamera( self.objpoints, self.imgpoints, img_size, None, None ) # 重投影误差评估 imgpoints2, _ = cv2.projectPoints(objpoints, rvecs, tvecs, mtx, dist) error = cv2.norm(imgpoints, imgpoints2, cv2.NORM_L2)/len(imgpoints2)
实际应用技巧
- 棋盘格要求:
- 使用哑光材质避免反光
- 保持棋盘格平整无褶皱
- 方格尺寸需精确测量
- 拍摄技巧:
- 覆盖图像不同区域(中心/边缘)
- 包含各种旋转角度(±30°以上)
- 近/中/远距离都要覆盖
- 质量评估:
- 重投影误差<0.5像素为优秀
- 误差>1像素需重新标定
- 检查边缘区域的畸变校正效果
标定结果应用
获取参数后,可轻松校正新图像:
代码语言:python
代码运行次数:0
运行
AI代码解释
params = np.load("camera_params.npz") mtx = params['camera_matrix'] dist = params['dist_coeffs'] # 畸变校正 undistorted = cv2.undistort(image, mtx, dist)
结语
精确的相机标定是计算机视觉应用的基石。本文提供的工具简化了标定流程,结合实践技巧,可实现毫米级精度的测量任务。标定后,您将获得更准确的AR导航、三维重建和工业检测结果。
源码获取:
代码语言:python
代码运行次数:0
运行
AI代码解释
""" 相机标定工具 使用说明: 1. 打印一个棋盘格标定板(推荐使用8x6的棋盘格,每个方格的尺寸为2.5cm x 2.5cm) 2. 将标定板放在不同位置和角度,让程序采集多张图片(建议15-20张) 3. 按空格键保存当前帧,按'q'键完成标定 """ import cv2 import numpy as np import os from datetime import datetime from typing import Optional, Tuple class CameraCalibrator: def __init__(self, board_size=(8, 6), square_size=0.025): """ 初始化相机标定器 参数: board_size: 棋盘格内部角点数量 (width, height) square_size: 每个方格的实际大小(单位:米) """ self.board_size = board_size self.square_size = square_size self.criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 准备对象点,如 (0,0,0), (1,0,0), (2,0,0) ....,(8,5,0) self.objp = np.zeros((board_size[0] * board_size[1], 3), np.float32) self.objp[:, :2] = np.mgrid[0:board_size[0], 0:board_size[1]].T.reshape(-1, 2) * square_size # 存储对象点和图像点的数组 self.objpoints = [] # 3D点(世界坐标系) self.imgpoints = [] # 2D点(图像平面) # 创建保存标定图像的目录 self.calib_dir = "calibration_images" os.makedirs(self.calib_dir, exist_ok=True) def find_corners(self, img: np.ndarray) -> tuple[bool, Optional[np.ndarray]]: """ 在图像中查找并优化棋盘格角点位置 参数: img: 输入的BGR彩色图像,形状为(H, W, 3) 返回: tuple[bool, Optional[np.ndarray]]: - 第一个元素(bool): 是否成功检测到棋盘格角点 - 第二个元素: 如果检测成功,返回优化后的角点坐标数组,形状为(N, 1, 2), 其中N是角点数量;如果检测失败,返回None """ gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, corners = cv2.findChessboardCorners(gray, self.board_size, None) if ret: # 提高角点检测精度 corners2 = cv2.cornerSubPix( gray, corners, (11, 11), (-1, -1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) ) return True, corners2 return False, None def add_calibration_image(self, img: np.ndarray, corners: np.ndarray) -> None: """ 添加标定图像及其角点数据到标定数据集 参数: img: 包含棋盘格的BGR彩色图像,形状为(H, W, 3) corners: 检测到的棋盘格角点坐标数组,形状为(N, 1, 2), 其中N是角点数量,通常为board_size[0] * board_size[1] 返回: None 副作用: - 将3D对象点(self.objp)添加到objpoints列表 - 将2D图像点(corners)添加到imgpoints列表 - 将图像保存到calibration_images目录下 """ self.objpoints.append(self.objp) self.imgpoints.append(corners) # 保存标定图像 timestamp = datetime.now().strftime("%Y%m%d_%H%M%S") filename = os.path.join(self.calib_dir, f"calib_{timestamp}.jpg") cv2.imwrite(filename, img) print(f"已保存标定图像: {filename}") def calibrate(self, img_size: tuple[int, int]) -> tuple[Optional[np.ndarray], Optional[np.ndarray], Optional[float]]: """ 执行相机标定计算 参数: img_size: 图像尺寸,格式为(宽度, 高度) 返回: tuple: 包含三个元素的元组: - camera_matrix (np.ndarray | None): 3x3相机内参矩阵,格式为: [[fx, 0, cx], [0, fy, cy], [0, 0, 1]] 其中(fx, fy)是焦距,(cx, cy)是主点坐标 - dist_coeffs (np.ndarray | None): 畸变系数,格式为[k1, k2, p1, p2, k3, ...] - k1, k2, k3: 径向畸变系数 - p1, p2: 切向畸变系数 - mean_error (float | None): 平均重投影误差(像素) 如果标定失败(如图像数量不足),则返回(None, None, None) """ if len(self.objpoints) < 5: print("错误:需要至少5张标定图像") return None, None, None ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera( self.objpoints, self.imgpoints, img_size, None, None ) # 计算重投影误差 mean_error = 0.0 for i in range(len(self.objpoints)): imgpoints2, _ = cv2.projectPoints( self.objpoints[i], rvecs[i], tvecs[i], mtx, dist ) error = cv2.norm(self.imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2) mean_error += error mean_error /= len(self.objpoints) print(f"重投影误差: {mean_error:.8f} 像素") print("\n相机内参矩阵:") print(mtx) print("\n畸变系数 (k1, k2, p1, p2, k3, ...):") print(dist[0]) return mtx, dist[0], mean_error def main(): # 初始化标定器 (8x6 棋盘格,每个方格2.5cm x 2.5cm) calibrator = CameraCalibrator(board_size=(8, 6), square_size=0.025) # 打开相机 (0 通常是内置摄像头) cap = cv2.VideoCapture(0) cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720) print("\n相机标定程序") print("1. 准备一个8x6的棋盘格标定板") print("2. 将棋盘格放在相机前不同位置和角度") print("3. 按空格键保存当前帧,按'q'键完成标定") print("4. 建议保存15-20张不同角度的图像") while True: ret, frame = cap.read() if not ret: print("无法获取相机画面") break # 查找棋盘格角点 ret_corners, corners = calibrator.find_corners(frame) # 如果找到角点,绘制出来 if ret_corners: cv2.drawChessboardCorners(frame, calibrator.board_size, corners, ret_corners) # 显示已保存的图像数量 cv2.putText(frame, f"Saved: {len(calibrator.objpoints)}/20", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2) # Display help text cv2.putText(frame, "Press SPACE to save, 'q' to finish", (10, frame.shape[0] - 20), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2) cv2.imshow("Camera Calibration (SPACE to save, 'q' to finish)", frame) key = cv2.waitKey(1) & 0xFF if key == ord(' '): # 空格键保存当前帧 if ret_corners: calibrator.add_calibration_image(frame.copy(), corners) if len(calibrator.objpoints) >= 20: print("已保存20张图像,可以按'q'键完成标定") else: print("未检测到完整的棋盘格,请调整位置后重试") elif key == ord('q'): # 'q'键退出 break # 执行标定 if len(calibrator.objpoints) >= 5: print("\n正在计算相机参数...") mtx, dist, error = calibrator.calibrate((frame.shape[1], frame.shape[0])) if mtx is not None: # 保存相机参数到文件 np.savez("camera_params.npz", camera_matrix=mtx, dist_coeffs=dist, reprojection_error=error) print("\n相机参数已保存到 camera_params.npz") # 释放资源 cap.release() cv2.destroyAllWindows() print("\n标定完成!") if __name__ == "__main__": main()


