
前言
停车位检测系统是指利用计算机视觉技术对停车场内的停车位进行实时监测和识别,以便为车主提供及时准确的空余停车位信息。停车位检测系统主要包括两个主要组成部分:硬件和软件。硬件方面,停车位检测系统需要使用摄像头或传感器等设备对停车场进行实时监测,以获取停车位的状态信息。软件方面,停车位检测系统需要使用计算机视觉技术对摄像头或传感器拍摄的图像进行分析和处理,以实现停车位的检测和识别。停车位检测系统的主要功能包括实时监测停车场内的停车位,精准识别车位状态,即刻提供车位空余信息,提高停车场的利用效率,减少车主的停车等待时间,缓解停车位紧张问题,改善城市停车环境,提高城市交通管理水平等。停车位检测系统在智慧城市建设、交通管理、商业运营等领域具有广泛的应用前景。同时,停车位检测系统还可以结合车辆管理系统、支付系统等其他系统,实现更加智能化的停车场管理和服务。
停车位检测系统基于机器视觉深度学习技术能够实现无人值守的不间断工作,并且系统可以主动发现监控区域内的空闲停车位情况;极大的节约了人员成本,提高了工作效率。这里给出博主设计的软件界面,同款的简约风,功能也可以满足图片、视频和摄像头的识别检测,希望大家可以喜欢,初始界面如下图:

检测系统的界面截图(点击图片可放大)如下图,可识别画面中存在的多个停车位,也可开启摄像头或视频检测:

详细的功能演示效果参见博主的B站视频或下一节的动图演示,觉得不错的朋友敬请点赞、关注加收藏!系统UI界面的设计工作量较大,界面美化更需仔细雕琢,大家有任何建议或意见和可在下方评论交流。
1. 效果演示
首先我们还是通过动图看一下识别的效果,系统主要实现的功能是对图片、视频和摄像头画面中的停车位进行识别,识别的结果可视化显示在界面和图像中,另外提供多个目标的显示选择功能,演示效果如下。
(一)用户注册登录界面
这里设计了一个登录界面,可以注册账号和密码,然后进行登录。界面还是参考了当前流行的UI设计,左侧是一个LOGO图,右侧输入账号、密码、验证码等等。

(二)选择图片识别
系统允许选择图片文件进行识别,点击图片选择按钮图标选择图片后,显示所有停车位识别的结果,可通过下拉选框查看单个停车位的结果。本功能的界面展示如下图所示:
(三)视频识别效果展示
很多时候我们需要识别一段视频,这里设计了视频选择功能。点击视频按钮可选择待检测的视频,系统会自动解析视频逐帧识别停车位,并将结果记录在右下角表格中,效果如下图所示:
2. 停车位数据集及训练
这里我们使用的停车位识别数据集,包含训练数据集8690张图片,验证集2483张图像,测试集1242张图像,共计12415张图片。以下是部分数据文件及对应标注情况:

每张图像均提供了图像类标记信息,图像中停车位的bounding box,停车位的关键part信息,以及停车位的属性信息,数据集并解压后得到如下的图片。
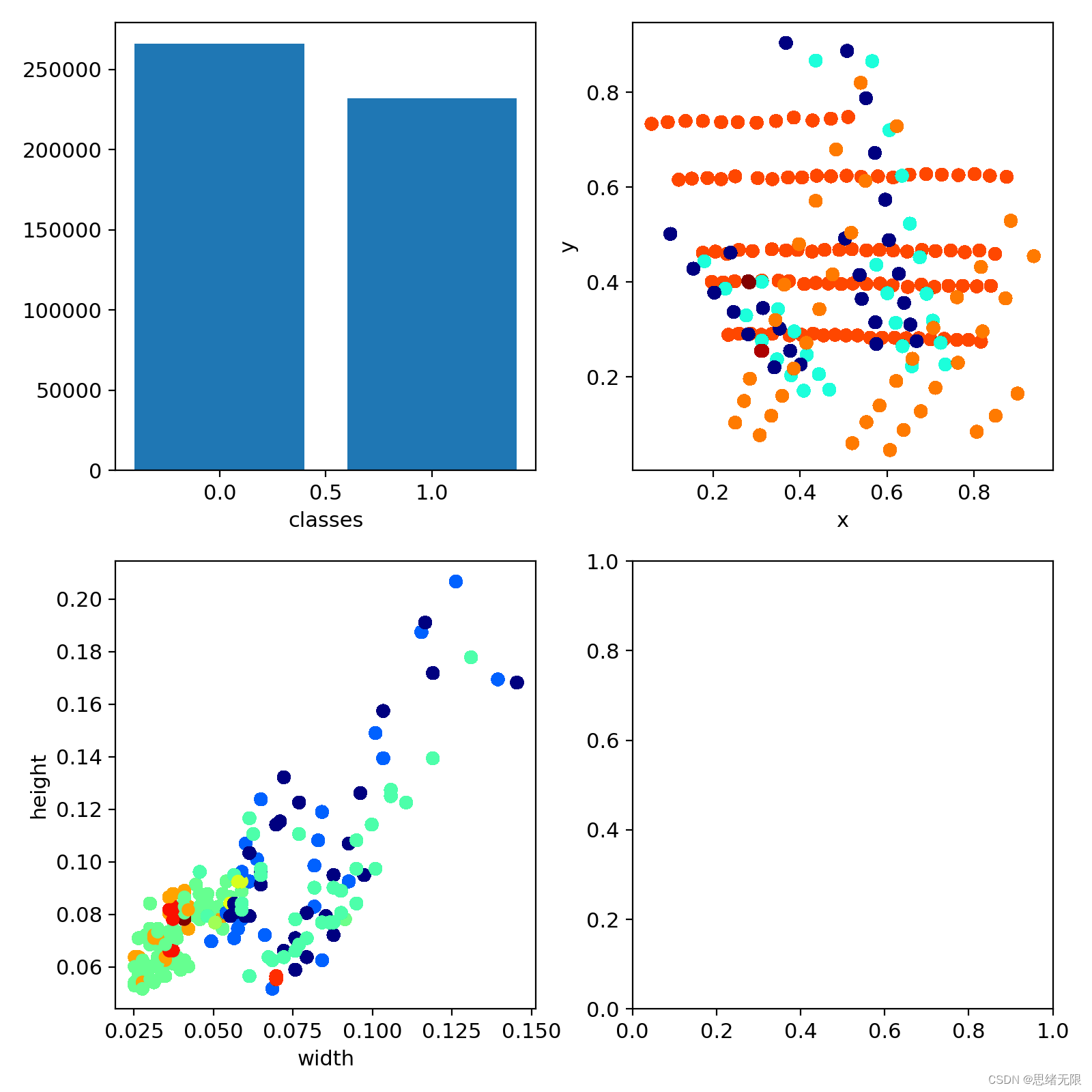
数据集中标签的分布如下图所示,两类标签(车位占用、与车位空出)的比例整体接近。
如图所示,这是我们需要的准备环节,首先要安装Yolov5的依赖库,配置一个Python3.8然后按照requirements.txt里面的依赖装环境就可以运行了。
python #请按照给定的python版本配置环境,否则可能会因依赖不兼容而出错 conda create -n env_rec python=3.8 #激活环境 activate env_rec #使用pip安装所需的以来,可通过requirement.txt pip install -r requirements.txt
如果使用离线依赖安装包,可以将最后一步的pip安装命令改为以下代码:
python pip install -r requirements.txt --no-index --find-links=./mylib/
作为YOLO系列的完善版本,YOLOv5优越的灵活性使得它可以方便地快速部署在车辆硬件侧。YOLOv5包含YOLOv5s、YOLOv5m、YOLOv5l, YOLOv5x。

YOLOv5s是YOLO系列中最小的版本,由于其内存大小为14.10M,更适合部署在车载移动硬件平台上,但其识别精度不能满足准确高效识别的要求,尤其是对小目标的识别。
YOLOv5的基本框架可以分为4个部分:Input、Backbone、Neck和Prediction。
Input部分通过拼接数据增强来丰富数据集,对硬件设备要求低,计算成本低。但是,这会导致数据集中原有的小目标变小,导致模型的泛化性能下降。
Backbone部分主要由CSP模块组成,通过CSPDarknet53进行特征提取。
在Neck中使用FPN和路径聚合网络(PANet)来聚合该阶段的图像特征。最后,网络进行目标预测并通过预测输出。
以上就是yolov5项目代码的整体介绍。我们训练和测试自己的数据集基本就是利用到如上的代码。
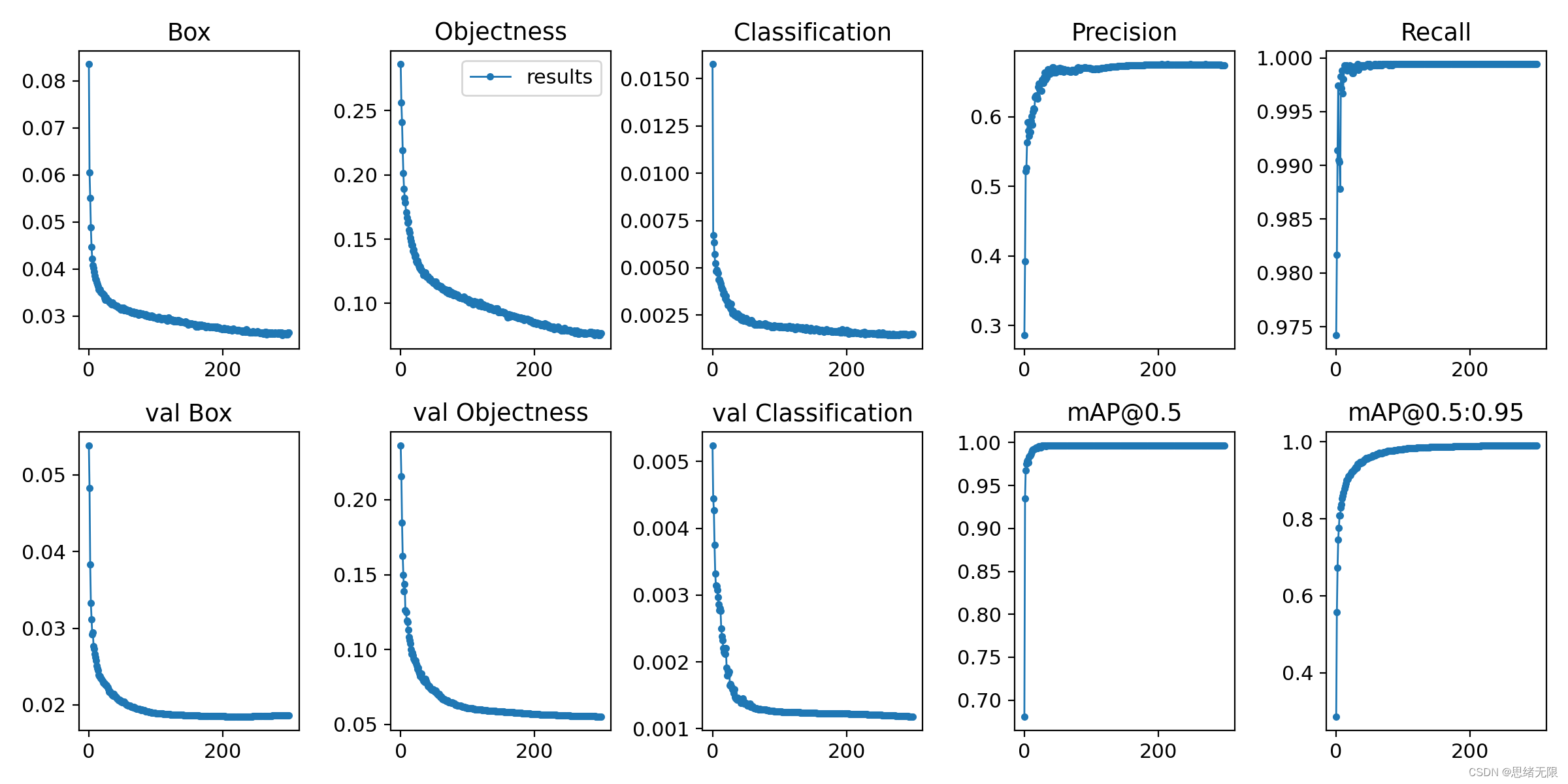
以上就是YOLOv5的整体介绍,接下来进行训练。本项目使用Yolov5训练了一个海上船舶目标检测模型,在笔记本的3070显卡下训练了300 epoch,训练集和验证集上损失、精确率、召回率、mAP的变化图:
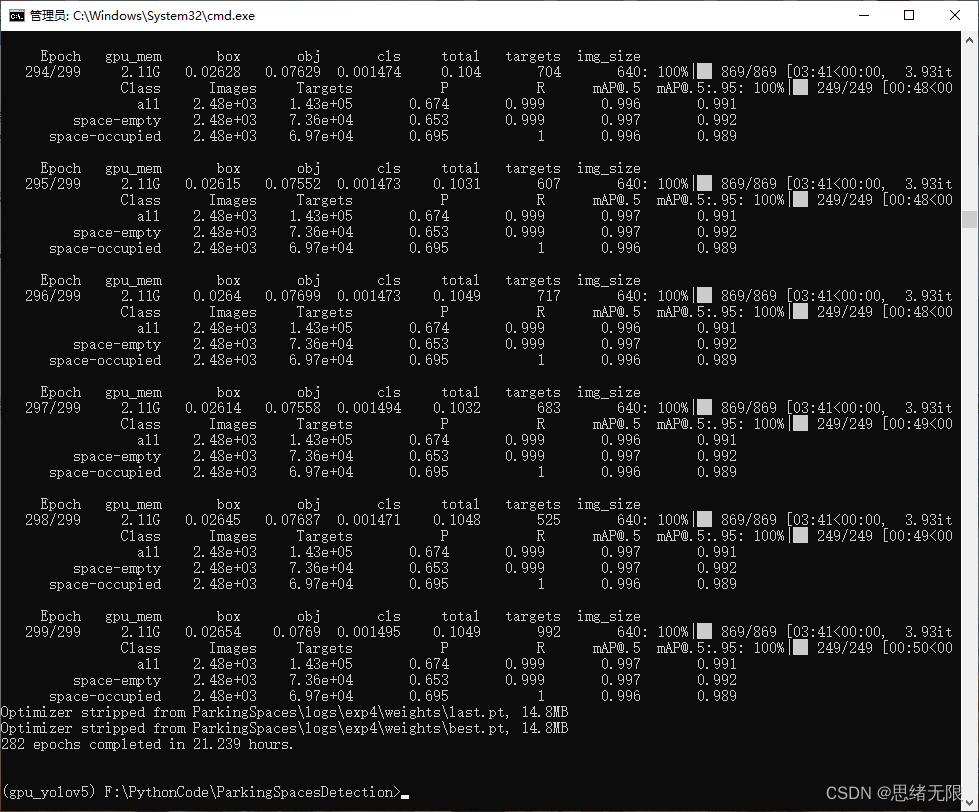
在深度学习中,我们通常通过损失函数下降的曲线来观察模型训练的情况。而YOLOv5训练时主要包含三个方面的损失:矩形框损失(box_loss)、置信度损失(obj_loss)和分类损失(cls_loss),在训练结束后,我们也可以在logs目录下找到生成对若干训练过程统计图。下图为博主训练停车位识别的模型的训练图和曲线图。
一般我们会接触到两个指标,分别是召回率recall和精度precision,两个指标p和r都是简单地从一个角度来判断模型的好坏,均是介于0到1之间的数值,其中接近于1表示模型的性能越好,接近于0表示模型的性能越差,为了综合评价目标检测的性能,一般采用均值平均密度map来进一步评估模型的好坏。我们通过设定不同的置信度的阈值,可以得到在模型在不同的阈值下所计算出的p值和r值,一般情况下,p值和r值是负相关的,绘制出来可以得到如下图所示的曲线,其中曲线的面积我们称AP,目标检测模型中每种目标可计算出一个AP值,对所有的AP值求平均则可以得到模型的mAP值。
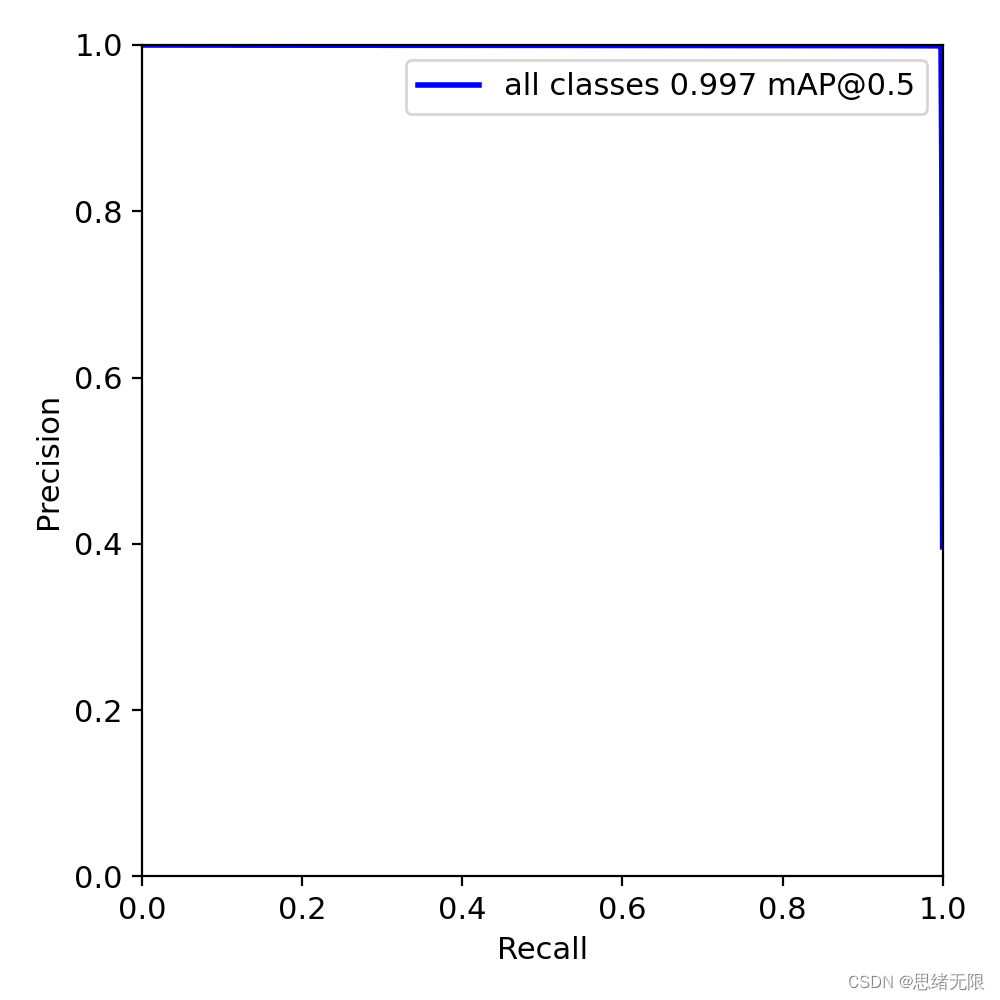
以PR-curve为例,可以看到我们的模型在验证集上的均值平均准确率为0.997。
3. 停车位检测识别
在训练完成后得到最佳模型,接下来我们将帧图像输入到这个网络进行预测,从而得到预测结果,预测方法(predict.py)部分的代码如下所示:
python def predict(img): img = torch.from_numpy(img).to(device) img = img.half() if half else img.float() img /= 255.0 if img.ndimension() == 3: img = img.unsqueeze(0) t1 = time_synchronized() pred = model(img, augment=False)[0] pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms) t2 = time_synchronized() InferNms = round((t2 - t1), 2) return pred, InferNms
得到预测结果我们便可以将帧图像中的停车位框出,然后在图片上用opencv绘图操作,输出停车位的类别及停车位的预测分数。以下是读取一个停车位图片并进行检测的脚本,首先将图片数据进行预处理后送predict进行检测,然后计算标记框的位置并在图中标注出来。
python if __name__ == '__main__': img_path = "./UI_rec/test_/Parking1.jpg" image = cv_imread(img_path) img0 = image.copy() img = letterbox(img0, new_shape=imgsz)[0] img = np.stack(img, 0) img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416 img = np.ascontiguousarray(img) pred, useTime = predict(img) det = pred[0] p, s, im0 = None, '', img0 if det is not None and len(det): # 如果有检测信息则进入 det[:, :4] = scale_coords(img.shape[1:], det[:, :4], im0.shape).round() # 把图像缩放至im0的尺寸 number_i = 0 # 类别预编号 detInfo = [] for *xyxy, conf, cls in reversed(det): # 遍历检测信息 c1, c2 = (int(xyxy[0]), int(xyxy[1])), (int(xyxy[2]), int(xyxy[3])) # 将检测信息添加到字典中 detInfo.append([names[int(cls)], [c1[0], c1[1], c2[0], c2[1]], '%.2f' % conf]) number_i += 1 # 编号数+1 label = '%s %.2f' % (names[int(cls)], conf) # 画出检测到的目标物 plot_one_box(image, xyxy, label=label, color=colors[int(cls)]) # 实时显示检测画面 cv2.imshow('Stream', image) # if cv2.waitKey(1) & 0xFF == ord('q'): # break c = cv2.waitKey(0) & 0xff
执行得到的结果如下图所示,图中停车位和置信度值都标注出来了,预测速度较快。基于此模型我们可以将其设计成一个带有界面的系统,在界面上选择图片、视频或摄像头然后调用模型进行检测。

博主对整个系统进行了详细测试,最终开发出一版流畅得到清新界面,就是博文演示部分的展示,完整的UI界面、测试图片视频、代码文件,以及Python离线依赖包(方便安装运行,也可自行配置环境),均已打包上传,感兴趣的朋友可以通过下载链接获取。




