能力说明:
精通JVM运行机制,包括类生命、内存模型、垃圾回收及JVM常见参数;能够熟练使用Runnable接口创建线程和使用ExecutorService并发执行任务、识别潜在的死锁线程问题;能够使用Synchronized关键字和atomic包控制线程的执行顺序,使用并行Fork/Join框架;能过开发使用原始版本函数式接口的代码。
 Apsara Clouder人工智能专项技能认证:Python数据科学分析实战
Apsara Clouder基础技能认证:阿里云RPA(机器人流程自动化)- 初级入门(可视化)
Apsara Clouder专项技能认证:实现调用API接口
Apsara Clouder大数据技能认证:基于机器学习的客户流失预警分析
Apsara Clouder大数据技能认证:基于工业数据的检测分析
Apsara Clouder人工智能专项技能认证:Python数据科学分析实战
Apsara Clouder基础技能认证:阿里云RPA(机器人流程自动化)- 初级入门(可视化)
Apsara Clouder专项技能认证:实现调用API接口
Apsara Clouder大数据技能认证:基于机器学习的客户流失预警分析
Apsara Clouder大数据技能认证:基于工业数据的检测分析
计算机方向专业,长期从事自动驾驶工作,主要负责感知模块。喜欢写博客和学习新知识。擅长深度学习和视觉算法开发,包括检测、分类和分割等方向。新技术和算法保持好奇,持续学习和跟进前沿技术。喜欢这样一句话:扬在脸上的自信,藏在心底的善良,溶在血液里的骨气,刻在生命里的坚强。
本文介绍使用雷达与多视角相机融合,实现3D目标检测、3D目标跟踪、道路环境BEV分割,它是来自ICCV2023的。CRN,全称是Camera Radar Net,是一个多视角相机-雷达融合框架。 通过融合多视角相机和雷达的特性,生成语义丰富且空间精确的BEV特征图。实现3D物体检测、跟踪和BEV分割任务。
BEVFusion提出一个融合多摄像头和激光雷达数据的框架,可用于3D检测。在自动驾驶领域,通过独立处理并融合摄像头和激光雷达数据,可以显著提升3D对象检测的准确性和稳健性,尤其是在激光雷达可能出现故障的真实场景中。
本文分享来自CVPR 2023的论文,提出了一种快速的主干网络,名为FasterNet。核心算子是PConv,partial convolution,部分卷积,通过减少冗余计算和内存访问来更有效地提取空间特征。
本文深入分析了大模型技术在自动驾驶领域的应用和影响,万字长文,慢慢观看~ 文中首先概述了大模型技术的发展历程,自动驾驶模型的迭代路径,以及大模型在自动驾驶行业中的作用。 接着,详细介绍了大模型的基本定义、基础功能和关键技术,特别是Transformer注意力机制和预训练-微调范式。 文章还介绍了大模型在任务适配性、模型变革和应用前景方面的潜力。 在自动驾驶技术的部分,详细回顾了从CNN到RNN、GAN,再到BEV和Transformer结合的技术迭代路径,以及占用网络模型的应用。 最后,文章重点讨论了大模型如何在自动驾驶的感知、预测和决策层面提供赋能,突出了其在该领域的重要性和影响力。
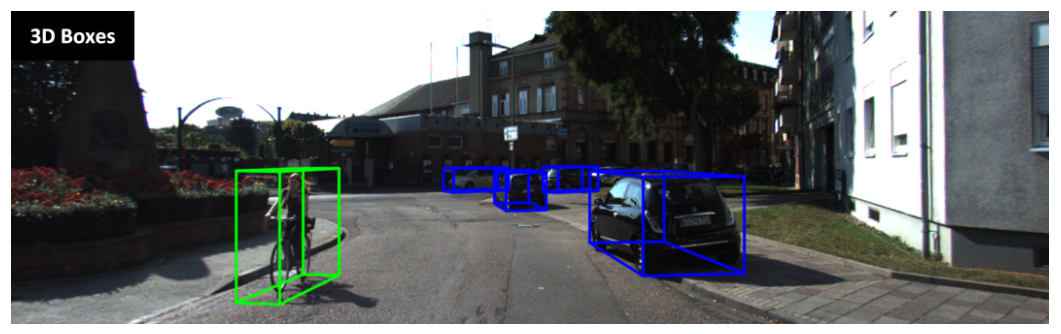
本文综合整理单目3D目标检测的方法模型,包括:基于几何约束的直接回归方法,基于深度信息的方法,基于点云信息的方法。万字长文,慢慢阅读~ 直接回归方法 涉及到模型包括:MonoCon、MonoDLE、MonoFlex、CUPNet、SMOKE等。 基于深度信息的方法 涉及到模型包括:MF3D、MonoGRNet、D4LCN、MonoPSR等。 基于点云信息的方法 涉及到模型包括:Pseudo lidar、DD3D、CaDDN、LPCG等。
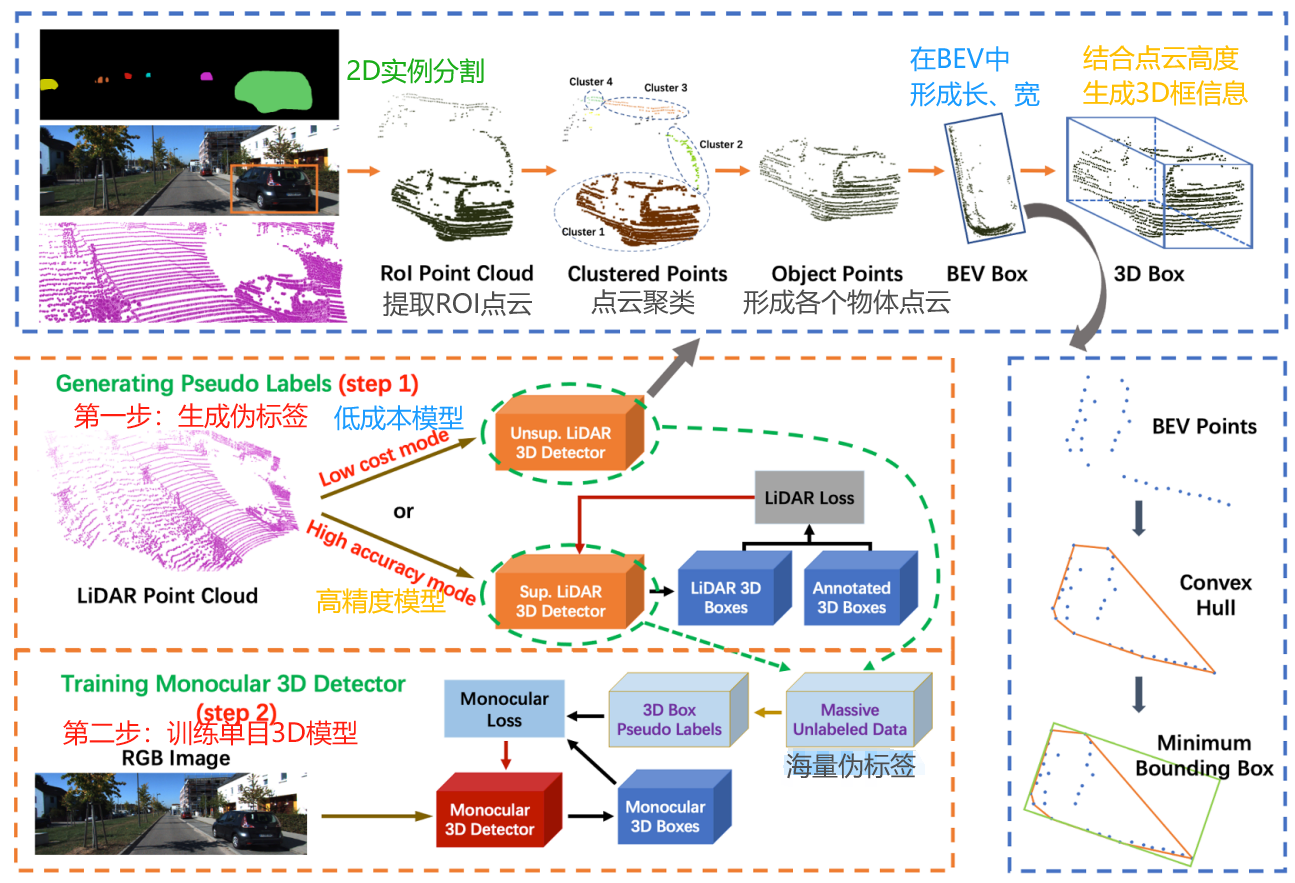
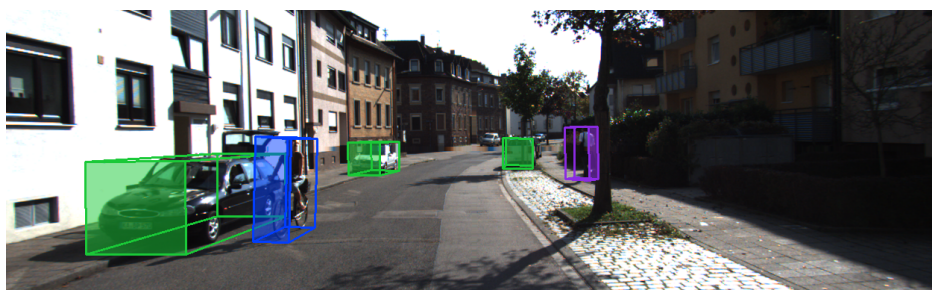
本文分享单目3D目标检测,LPCG模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。
本文分享 MonoCon 的模型训练、模型推理、可视化3D检测结果、以及可视化BEV效果。
本文分享单目3D目标检测,MonoCon模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。
本文分享 MonoDLE 的模型训练、模型推理、可视化3D检测结果。
本文分享单目3D目标检测,MonoDLE模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。
本文分享单目3D目标检测,MonoFlex 模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。
本文分享单目3D目标检测,DD3D 模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。
本文分享单目3D目标检测,CUPNet 模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。
本文分享SMOKE的模型推理,和可视化结果。以kitti数据集为例子,对训练完的模型进行推理,并可视化3D框的结果,画到图像中。
本文分享SMOKE最新的版本的环境搭建,以及模型训练;环境关键库版本:pytorch 1.12.0、CUDA 11.3、cudnn 8.3.2、python 3.7、DCNv2。
SMOKE是一种用于自动驾驶的实时单目 3D 物体检测器。为什么会注意这边文章呢?是因为这两天发布的百度Apollo 7.0 的摄像头障碍物感知,也是基于这个模型改进的;于是令我产生了一些兴趣。
本文介绍如何搭建3D目标检测框架,使用docker快速搭建MMDetection3D的开发环境,实现视觉3D目标检测、点云3D目标检测、多模态3D目标检测等等。
平常的目标检测是平行的矩形框,“方方正正”的;但对于一些特殊场景(遥感),需要倾斜的框,才能更好贴近物体,旋转目标检测来啦~
多目标跟踪器的性能需要某些指标来进行度量,目前使用比较广泛的评测指标主要有 Bernardin 等人定义的 CLEAR MOT 指标、Ristani 等人定义的 ID scores 指标以及最新的 Luiten 等人定义的HOTA 指标。
本文首先简要介绍 Tensor RT 的输入、输出以及部署流程,了解 Tensor RT 在部署模型中起到的作用。然后介绍 Tensor RT 模型导入流程,针对不同的深度学习框架,使用不同的方法导入模型。
ChatGPT最近挺火的,据说还能写程序,感到有些惊讶。于是在使用ChatGPT有一周左右后,分享一下用它写程序的效果如何。
ChatGPT发展与技术基础
有时需要看英文论文,奈何英语水平不太好,看完10几页的文档很吃力;于是到网上找了一大堆方法,一个一个尝试,还好有几个勉强能用的;这里分享一下。 PS:虽然有网页翻译,但是我不太喜欢一段一段复制。本文分享的方法,目前测试过都是免费的。
在Linux系统查看PCD 点云有许多方法,但发现在windows下的工具比较少,这里分享两个思路,一个是使用MATLAB工具编程,另一个是下载CloudCompare软件进行查看点云。
在Ubuntu系统,创建一个docker,然后搭建conda深度学习环境,这样可以用conda或pip安装相关的依赖库了。
本文记录docker保存镜像、打包tar、加载tar镜像。
本文分享如何使用docker获取Nvidia 镜像,包括cuda10、cuda11等不同版本,cudnn7、cudnn8等,快速搭建深度学习环境。
最近看了北京理工大学的课程《智能车辆概述与应用》,感觉入门角度讲的还不错的,于是通过本文记录关键内容。
解算 IMU 采样数据的过程与惯导解算技术原理有关,而提高定位精度的方法主要依赖于IMU自身精度的提高和算法改进。
本文分析卡尔曼滤波和扩展卡尔曼滤波,包括:思路流程、计算公式、简单案例等。滤波算法,在很多场景都有应用,感觉理解其思路和计算过程比较重要。
本文介绍卷积神经网络的入门案例,通过搭建和训练一个模型,来对10种常见的物体进行识别分类;
本文介绍注意力机制的概念和基本原理,并站在计算机视觉CV角度,进一步介绍通道注意力、空间注意力、混合注意力、自注意力等。
本文介绍SE注意力模块,它是在SENet中提出的,SENet是ImageNet 2017的冠军模型;SE模块常常被用于CV模型中,能较有效提取模型精度,所以给大家介绍一下它的原理,设计思路,代码实现,如何应用在模型中。
本文使用深度卷积生成对抗网络(DCGAN)生成手写数字图片,代码使用Keras API与tf.GradientTape 编写的,其中tf.GradientTrape是训练模型时用到的。
鸢尾花识别是学习AI入门的案例,这里和大家分享下使用Tensorflow 2框架,编写程序,获取鸢尾花数据,搭建神经网络,最后训练和识别鸢尾花。
首先进行双目定标,获取双目摄像头内部的参数后,进行测距。本次的双目视觉测距,基于BM算法。
本文主要介绍在OpenCV用使用双目摄像头,包括:打开单目摄像头、设置摄像头参数、拍照、录制视频。
基于YOLO进行物体检测、对象识别,先和大家分享如何搭建开发环境,会分为CPU版本、GPU版本的两种开发环境,本文会分别详细地介绍搭建环境的过程。主要使用TensorFlow2.3、opencv-python4.4.0、Pillow、matplotlib 等依赖库。
基于YOLO进行物体检测、对象识别,在搭建好开发环境后,先和大家进行实践应用中,体验YOLOv3物体/目标检测效果和魅力;同时逐步了解YOLOv3的不足和优化思路。
YOLO、SSD、Fast R-CNN等模型在目标检测方面速度较快和精度较高,但是这些模型比较大,不太适合移植到移动端或嵌入式设备;轻量级模型 NanoDet-m,对单阶段检测模型三大模块(Head、Neck、Backbone)进行轻量化,目标加检测速度很快;模型文件大小仅几兆(小于4M)。
YOLACT是经典的单阶段、实时、实例分割方法,在YOLOv5和YOLOv8中的实例分割,也是基于 YOLACT实现的,有必要理解一下它的模型结构和设计思路。
最近在看YOLOv5 第6个版本的代码,记录了一下笔记,分享一下。首先看了网络结构、网络组件,对应代码models\common.py。然后看了激活函数,对应代码utils\activations.py。
F-PointNet 提出了直接处理点云数据的方案,但这种方式面临着挑战,比如:如何有效地在三维空间中定位目标的可能位置,即如何产生 3D 候选框,假如全局搜索将会耗费大量算力与时间。 F-PointNet是在进行点云处理之前,先使用图像信息得到一些先验搜索范围,这样既能提高效率,又能增加准确率。 论文地址:Frustum PointNets for 3D Object Detection from RGB-D Data 开源代码:https://github.com/charlesq34/frustum-pointnets
MV3D-Net融合了视觉图像和激光雷达点云信息;它只用了点云的俯视图和前视图,这样既能减少计算量,又保留了主要的特征信息。随后生成3D候选区域,把特征和候选区域融合后输出最终的目标检测框。 论文地址:Multi-View 3D Object Detection Network for Autonomous Driving 开源代码:GitHub - bostondiditeam/MV3D: Multi-View 3D Object Detection Network for Autonomous Driving
本文介绍在3D目标检测中,理解和使用KITTI 数据集,包括KITTI 的基本情况、下载数据集、标签格式解析、3D框可视化、点云转图像、画BEV鸟瞰图等,并配有实现代码。
本文分享在DAIR-V2X-V数据集中,将标签转为Kitti格式,并可视化3D检测效果。
本文分享国内场景3D目标检测,公开数据集 DAIR-V2X-V(也称为DAIR-V2X车端)。DAIR-V2X车端3D检测数据集是一个大规模车端多模态数据集,包括: 22325帧 图像数据 22325帧 点云数据 2D&3D标注 基于该数据集,可以进行车端3D目标检测任务研究,例如单目3D检测、点云3D检测和多模态3D检测。
总结一下视频监控的数据集,用于目标检测、跟踪,持续跟新中..........
本文整理了10个质量较好,数据集较大,比较新的,图像语义分割的公开数据集;主要服务于智能驾驶方向(辅助驾驶、自动驾驶等)。
面向智能驾驶(辅助驾驶、自动驾驶)场景下的语义分割任务,由于非结构化场景的复杂性,是一个非常具有挑战性的任务,所以有许多研究者和研究机构公开了很多相关的数据集推动语义分割领域的发展。本文主要介绍Cityscapes数据集。
 发表了文章
2024-05-15
发表了文章
2024-05-15
发表了文章
2023-11-20
发表了文章
2023-11-16
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2024-05-15
发表了文章
2024-05-15
发表了文章
2023-11-20
发表了文章
2023-11-16
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15
发表了文章
2023-11-15

 回答了问题
2023-11-22
回答了问题
2023-11-15
回答了问题
2023-11-22
回答了问题
2023-11-15
 提交了问题
2020-05-20
提交了问题
2020-05-20
回答了问题
2019-07-22
提交了问题
2020-05-20
提交了问题
2020-05-20
回答了问题
2019-07-22