能力说明:
了解Python语言的基本特性、编程环境的搭建、语法基础、算法基础等,了解Python的基本数据结构,对Python的网络编程与Web开发技术具备初步的知识,了解常用开发框架的基本特性,以及Python爬虫的基础知识。
能力说明:
掌握计算机基础知识,初步了解Linux系统特性、安装步骤以及基本命令和操作;具备计算机基础网络知识与数据通信基础知识。
暂时未有相关云产品技术能力~
暂无个人介绍
## 广度优先遍历(BFS)算计介绍 广度优先遍历(BFS)和深度优先遍历(DFS)同属于两种经典的图遍历算法 **广度优先遍历算法**:首先从某个节点出发,一层一层的遍历,下一层必须等到上一层节点全部遍历完之后才会开始遍历 **基本思想**:尽最大程度辐射能够覆盖的节点,并对其进行访问。
**地面点提取方法** LeGO-LOAM中前端改进中很重要的一点就是充分利用地面点,本片博客主要讲解 如何进行地面点提取 如下图所示,相邻的两个scan的同一列,打在地面上,形成两个点A和B。
 论文的标题是:**LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain** - 标题给出的应用场景是 **可变地形** - 重点是 **轻量级** 并 利用 **地面优化** - 本质依然是一个 **激光雷达里程计和建图**
LeGO-LOAM 的英文全称是 **lightweight and ground optimized lidar odometry and mapping**。轻量化具有地面优化的激光雷达里程计和建图  其框架如下,大体和LOAM是一致的 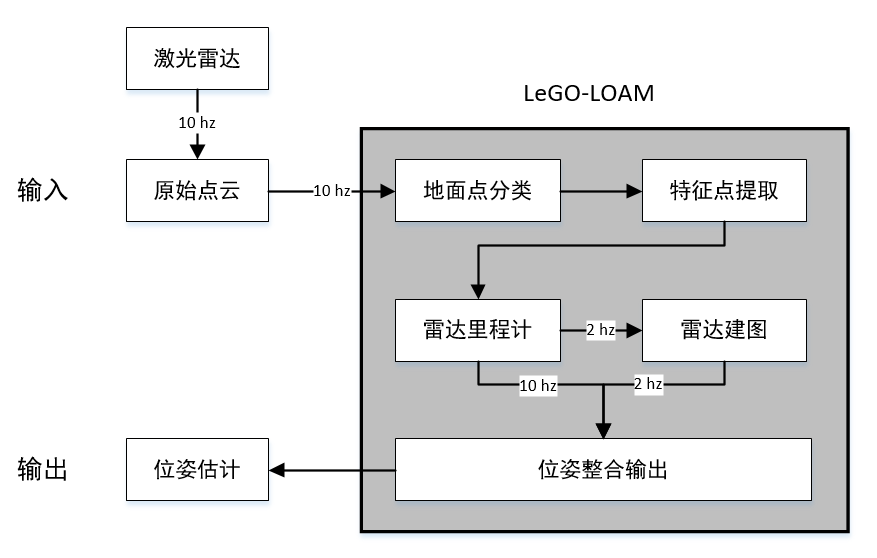 LeGO-LOAM是基于LOAM的改进版本
在[这篇博客](https://blog.csdn.net/qq_32761549/article/details/125385567?spm=1001.2014.3001.5501)中介绍了Livox的时间硬件同步的3种方法,其中有一种方法是通过PPS信号的方式,信号时间同步。本篇通过STM32 TIM3定时器的更新中断,产生符合要求的PPS信号。
ROS功能包:livox_camera_lidar_calibration提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。 在前几篇中介绍了livox_camera_lidar_calibration功能包.以及在gazebo中搭建了标定场景.并进行外参标定,进行了简单的验
ROS功能包:**livox_camera_lidar_calibration**提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
ROS功能包:**livox_camera_lidar_calibration**提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
ROS功能包:**livox_camera_lidar_calibration**提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
ROS功能包:**livox_camera_lidar_calibration**提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
前两篇介绍了相机和livox激光雷达外参标定:ROS功能包的livox_camera_lidar_calibration 和使用方法. 具体链接: - [链接1](https://www.guyuehome.com/38522) - [链接2](https://www.guyuehome.com/38524) 本篇在gazebo中搭建可以模拟产生livox_camera_lidar_calibration功能包需要的数据的仿真场景.
该功能包提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
**什么是相机与激光雷达外参标定?** 就是相机坐标系和激光雷达坐标系的TF变化。位置x,y,z 欧拉角 roll,pitch,yaw,6个变量构成一个4*4的旋转变换矩阵 标定的就是这个4维的旋转矩阵。 标定的方法有: - 基于特征 - 基于运动观测 - 基于最大化互信息 - 基于深度学习 基于特征 的方法是根据对应特征点求解PnP问题,需要标定板来获取特征 基于运动观测可以看作手眼标定问题,精度决定于相机和雷达的运动估计 基于最大化互信息认为图像灰度于反射强度具有相关性 基于深度学习需要长时间的训练并且泛化能力不高
本篇为ALOAM后端的最终篇,地图更新及消息发布。 **地图更新原因:** - 当地图调整之后,栅格有些空着的,需要进行填充 - 保障地图的实时更新 - 当前帧的点云加到地图中去,下帧会有更多的匹配点
在上一篇[博客](https://www.guyuehome.com/38662)(ALOAM:后端lasermapping通过Ceres进行帧到地图的位姿优化)中,通过Ceres优化得到了 **当前帧到地图的最优位姿** 下面要做的是更新地图模块中维护的一个位姿,这个位姿就是**odom到map之间的位姿变换**。 **为什么要更新这个位姿呢?** 因为在前面[这篇](https://www.guyuehome.com/38611)博客中(ALOAM:后端laserMapping代码结构与数据处理分析),在收到前端里程计数据后,会以前端里程计的频率,向外发布一个高频率当前帧到地图坐标系下
上一篇博客构建了线约束和面约束,添加到了残差模块。 [ALOAM:后端 lasermapping构建角点约束与面点约束 本片主要介绍通过ceres构建的约束的CostFuction,及后续的通过Ceres进行位姿优化
后端的构建约束问题和前端不一样。原因就是前端从上一帧上去找,而后端是在局部地图上找,点要多很多,并且没有了线束信息,所以原理上不一样了。 **线特征的提取** 通过kdtree在局部地图中找到5个最近的线特征,为了判断他们是否符合线特征的特性,需要对5个点构成的协方差矩阵进行特征值分解,当上述5个点在一条直线上时,他们只有一个主方向,也就是特征值是一个大特征值,以及两个小特征值,大特征值对应的特征向量就是对应直线的方向向量。 **面特征的提取** 通过kdtree在地图中找到最近的面特征也是5个, 理论上也可以通过特种值分解的方式,最小的特征值对应的特征向量就是平面的法向量, 不过代码里选
不同于前端的scan-to-scan的过程,ALOAM的后端是scan-to-map的算法,具体来说就是把当前帧和地图进行匹配,得到更准确的位姿同时也可以构建更好的地图.由于是scan-to-map的算法,因此计算量会明显高于scan-to-scan的前端,所以后端通常处于一个低频的运行频率,但是由于scan-to-map的精度往往优于scan-to-scan.因此后端也有比前端更高的精度.为了提高后端的处理速度,所以要进行地图的栅格化处理
ALOAM方法实现了低的漂移,并且计算的复杂度低,实时性很好.并且不需要高精度的lidar和惯导 这个方法的核心思想就是把SLAM问题进行了拆分,通过两个算法来进行.一个是执行高频率的前端里程计但是低精度的运动估计(定位),另一个算法在比定位低一个数量级的频率执行后端建图(建图和校正里程计).
ALOAM方法实现了低的漂移,并且计算的复杂度低,实时性很好.并且不需要高精度的lidar和惯导 这个方法的核心思想就是把SLAM问题进行了拆分,通过两个算法来进行.一个是执行高频率的**前端里程计**但是低精度的运动估计(定位),另一个算法在比定位低一个数量级的频率执行**后端建图**(建图和校正里程计). 这个两个算法都需要提特征点,就是经典的角点和面点,然后进行配准.在前端的那个算法中也就是里程计算法,特征点的提取会用到快速计算的方法.在建图的后端算法中,相互关联的特征点是通过特征值和特征向量来获得的.
A-LOAM的cpp有四个,其中 kittiHelper.cpp 的作用是将kitti数据集转为rosbag 剩下的三个是作为 slam 的 部分,分别是: - laserMappin.cpp ++++ 当前帧到地图的优化 - laserOdometry.cpp ++++ 帧间里程计 - scanRegistration.cpp ++++ 前端lidar点预处理及特征提取
通常一个优化器会帮助解决优化问题中大部分内容,但是残差的计算以及残差对优化变量的雅克比矩阵通常需要用户自己定义,而雅克比矩阵通常比较复杂,因此有的优化库如G2O,GTSAM会预先定义好一些常见的优化问题,所涉及的残差及雅克比计算方式,但是并不能覆盖所有场景,一旦有些问题不是优化器事先建模好的问题,那就需要用户自己去定义残差和雅克比矩阵的计算方式,这个会非常麻烦,而且容易出错.ceres通过引用自动求导的功能,无论什么优化问题,用户只需要定义残差的计算方式,自动求导功能会帮助用户计算对应的雅克比矩阵来实现优化问题的求解.
**什么是激光雷达的运动畸变 ?** 激光雷达的一帧数据是过去一周期内形成的所有数据,数据仅有一时间戳,而非某个时刻的数据,因此在这一帧时间内的激光雷达或者其载体通常会发生运动,因此,这一帧的原点不一致,会导致一些问题,这个问题就是**运动畸变**
在LOAM的论文中,作者提到了要剔除两种异常点. - 平行点 - 遮挡点 但是在ALOAM的代码中并未写相关的功能. 如果想把论文中两种异常点的剔除机制加进去,可以参考下面的代码.
A-LOAM的cpp有四个,其中 kittiHelper.cpp 的作用是将kitti数据集转为rosbag 剩下的三个是作为 slam 的 部分,分别是: - laserMappin.cpp ++++ 当前帧到地图的优化 - laserOdometry.cpp ++++ 帧间里程计 - scanRegistration.cpp ++++ 前端lidar点预处理及特征提取 本片主要解读 前端lidar点特征提取部分的代码
A-LOAM的cpp有四个,其中 kittiHelper.cpp 的作用是将kitti数据集转为rosbag 剩下的三个是作为 slam 的 部分,分别是: - laserMappin.cpp ++++ 当前帧到地图的优化 - laserOdometry.cpp ++++ 帧间里程计 - scanRegistration.cpp ++++ 前端lidar点预处理及特征提取 本片主要解读 前端lidar点预处理部分的代码
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。
 发表了文章
2022-10-14
发表了文章
2022-10-14
发表了文章
2022-10-14
发表了文章
2022-10-13
发表了文章
2022-10-13
发表了文章
2022-10-13
发表了文章
2022-09-23
发表了文章
2022-09-23
发表了文章
2022-09-23
发表了文章
2022-09-22
发表了文章
2022-09-22
发表了文章
2022-09-22
发表了文章
2022-09-20
发表了文章
2022-09-20
发表了文章
2022-09-20
发表了文章
2022-09-19
发表了文章
2022-09-19
发表了文章
2022-09-19
发表了文章
2022-09-16
发表了文章
2022-09-16
发表了文章
2022-10-14
发表了文章
2022-10-14
发表了文章
2022-10-14
发表了文章
2022-10-13
发表了文章
2022-10-13
发表了文章
2022-10-13
发表了文章
2022-09-23
发表了文章
2022-09-23
发表了文章
2022-09-23
发表了文章
2022-09-22
发表了文章
2022-09-22
发表了文章
2022-09-22
发表了文章
2022-09-20
发表了文章
2022-09-20
发表了文章
2022-09-20
发表了文章
2022-09-19
发表了文章
2022-09-19
发表了文章
2022-09-19
发表了文章
2022-09-16
发表了文章
2022-09-16