






已有成熟的操作系统,为什么还要研发国产操作系统呢?
龙蜥+超级探访上线啦!《龙蜥+超级探访》是龙蜥社区打造的全网首档操作系统探访体验节目,面向社区用户和开发者展示合作示范标杆,让大家充分了解龙蜥是什么、与龙蜥合作能带来什么价值。《龙蜥+超级探访》第一期走进统信软件技术有限公司,统信软件系中国操作系统领创者,致⼒于为⽤户与合作伙伴提供安全稳定、智能易⽤的中国操作系统产品及服务,点击下方链接即可观看!https://developer.aliyun.com/live/252289?spm=a2c6h.26396819.creator-center.6.2aef3e1
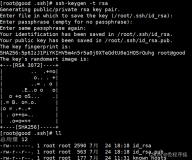
【VsCode远程开发】Windows SSH远程连接Linux服务器 - 无公网IP内网穿透(三)
【VsCode远程开发】Windows SSH远程连接Linux服务器 - 无公网IP内网穿透(三)
【VsCode远程开发】Windows SSH远程连接Linux服务器 - 无公网IP内网穿透(二)
【VsCode远程开发】Windows SSH远程连接Linux服务器 - 无公网IP内网穿透(二)
【VsCode远程开发】Windows SSH远程连接Linux服务器 - 无公网IP内网穿透(一)
【VsCode远程开发】Windows SSH远程连接Linux服务器 - 无公网IP内网穿透

Linux目录与文件的相关操作
0、关机重启命令 关机命令 sudo shutdown -h now 重启命令 sudo reboot 1、目录的切换 打开终端窗口(”ctrl+alt+t“) 一般使用(”pwd“)显示当前所在的目录 比如:当前目录是在home下面的,与用户名相同的文件夹,可以使用(”cd“)命令来切换目录; 进入下载目录(”cd home/a/下载“)这种从给目录开头的一长串路经”叫做绝对路径“; 进入图片目录(”cd .. /图片/“)".."代表当前路径的上级路径,相对于当前的目录而言的”叫做相对路径“,(”.“)代表当前路径; 如果,想快速切换,上一个所在目录可以(”cd -“); 如果,想快速切换
ceb2Pdf.exe实现ceb文件转pdf,内网离线安装wine(手动编译32位)实现在centos(linux)上运行window程序exe程序,解决wine : Z:\xxx EXE格式无效
最近项目需要实现ceb文件在线预览,之前并没见过这格式的文件,一搜发现果然不简单,这破东西还不太好弄在线预览,经过查找发现只有windows版本的cebToPdf.exe程序可以转换成pdf再进行预览,但是我们服务器是centos(内网)啊,所以就有了该篇文章。

龙蜥操作系统
龙蜥社区(OpenAnolis)是面向国际的 Linux 服务器操作系统开源根社区及创新平台,秉承“平等、开放、协作、创新”的原则,理事会由阿里云、统信软件、龙芯、Arm 、Intel 等 24 家国内外头部企业共同组成,有超过 1000 家来自芯片厂商、软件厂商、整机厂商、操作系统厂商等覆盖操作系统全产业链的合作伙伴参与生态共建。
