“我们认为有皮肤是理所当然的,但实际上它是一个复杂的传感、信号和决策系统。”斯坦福大学化学工程教授兼主要作者(senior author)之一Zhenan Bao(鲍哲楠)说,“这种人工感觉神经系统是向各种各样的应用创造类似皮肤感觉神经网络迈出的一步。”
这项研究报告于5月31日发表在《科学》杂志上,它成为假肢制造人造皮肤的一个步骤,它可以让截肢者恢复知觉,也许有一天会带给机器人某种反射能力。
构建人工感觉神经回路,有朝一日会成为人造皮肤的一部分
鲍哲楠在研究中试图模仿皮肤如何伸展、自我修复,最引人注目的是,它就像一个智能的感觉网络一样,不仅知道如何将愉快的感觉传递给大脑,而且还可以命令肌肉做出反射性的反应,做出迅速的决定。
这篇新的科学论文描述了研究人员如何构建一种人工感觉神经回路,这种神经回路可以嵌入到未来神经假肢设备和软机器人的皮肤上。这个基本的人工神经电路集成了前面描述的三个组件(传感、信号、决策)。
第一个是触觉传感器,可以检测到微小的力量。这个传感器通过第二个元件——一个灵活的电子神经元——发送信号。触觉传感器和电子神经元是鲍哲楠实验室先前被报道的发明的改进版。
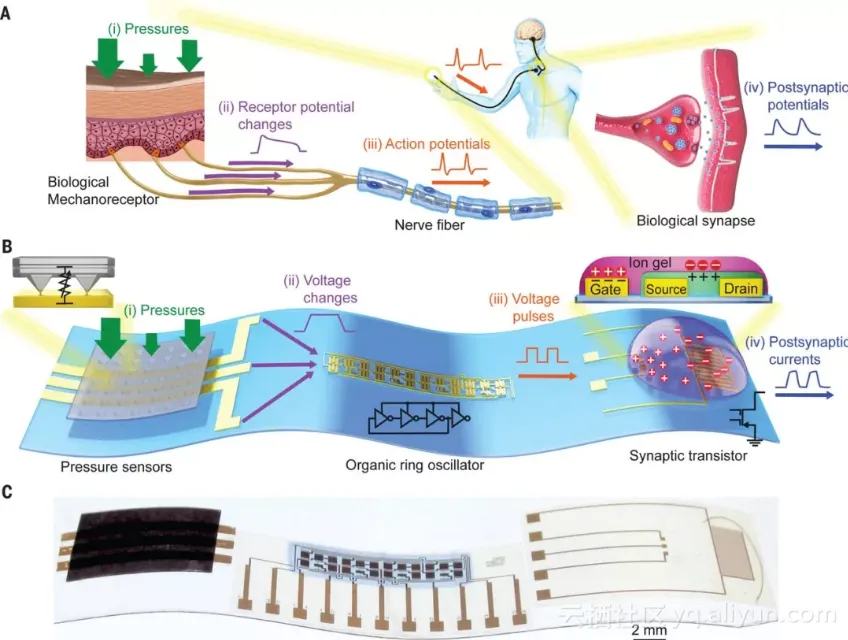
人工传入神经系统与生物神经系统的比较
(A)受压力刺激的生物传入神经。施加在机械感受器上的压力会改变每个机械感受器的感受器电位(receptor potentials)。感受器电位合并并启动在血脉的动作电位。神经纤维与脊髓内的神经元之间形成突触。多个神经纤维的动作电位通过突触结合在一起,有助于信息处理。
(B)由压力传感器、有机环形振荡器和突触晶体管组成的人工传入神经。为了简单起见,这里只显示了一个连接到突触晶体管的环形振荡器。然而,多个带压力传感器的环形振荡器可以连接到一个突触晶体管。(A)和(B)中颜色相同的部分相互对应。
(C)人工传入神经系统的照片。
来自这些组件的感觉信号刺激第三个组件,一个模拟人类突触的人工突触晶体管。这个突触晶体管是国立首尔大学的李泰宇(Tae-Woo Lee)发明的,他在鲍哲楠的斯坦福实验室(Stanford lab)度过了他休假年,并开始了这项合作工作。
“生物突触可以传递信号,也可以储存信息来做出简单的决定,”Lee是论文的第二主要作者(second senior author),他说,“突触晶体管在人工神经回路中执行这些功能。”
Lee用膝关节反射作为一个例子,来解释更高级的人工神经回路如何有朝一日会成为人造皮肤的一部分,从而为假肢装置或机器人提供感官和反射。
对人类而言,当突然敲击导致膝盖肌肉伸展时,这些肌肉中的某些传感器会通过神经元发出脉冲。神经元依次向相关的突触发送一系列信号。突触网络识别突然伸展的模式,同时发出两个信号,一个导致膝部肌肉反射性收缩,另一个不那么紧迫的信号在大脑中记录这种感觉。
人工神经可以探测到各种触觉,并让蟑螂的腿抽搐
新工作在达到这种复杂性之前还有很长的路要走。但在科学论文中,研究小组描述了电子神经元如何向突触晶体管发送信号,这种信号是通过基于低功率信号的强度和频率识别并响应传感输入而设计的,就像生物突触一样。
小组成员测试了系统产生反射和触觉的能力。
在一项测试中,他们将人工神经连接到蟑螂的腿上,并对他们的触觉传感器施加微小的压力增量。电子神经元将传感器信号转换为数字信号,并通过突触晶体管将其传递出去,当触觉传感器上的压力增加或减少时,蟑螂的腿就随着压力或多或少地剧烈地抽搐。(视频中有演示)
他们还展示了人工神经可以探测到各种触觉。在另一个实验中,人工神经能够区分盲文字母。此外,他们在传感器上以不同的方向滚动一个圆柱体,并精确地检测到运动方向。
研究人员表示,人工神经技术仍处于起步阶段。例如,为假肢设备制造人造皮肤将需要新的设备来检测热量和其他感觉,也需要嵌入柔性电路的能力,并找到与大脑相连的方法。
研究团队还希望开发一种低功耗的人工传感器网络来覆盖到机器人身上,其想法是通过提供一些从人类皮肤上获得的反馈来使它们更加灵活。
原文发布时间为:2018-06-4
本文来自云栖社区合作伙伴新智元,了解相关信息可以关注“AI_era”。



