
2026年,OpenClaw(Clawdbot)的生态已形成多场景、多机器人协同运行的格局,不少用户同时部署多个机器人,分别对接不同平台、绑定不同模型、执行不同任务。但多机器人管理的痛点也随之凸显:模型绑定混乱、服务状态难监控、token消耗无统计、技能管理分散,传统命令行运维方式已难以应对。
开源项目OpenClaw-bot-review的出现,为多机器人管理提供了可视化解决方案——这款无需数据库的轻量仪表盘,可直接读取OpenClaw配置文件与会话数据,实现机器人状态、模型列表、会话记录、技能管理、统计分析的一站式管控,甚至加入趣味化像素人互动功能,让枯燥的运维工作更具趣味性。本文结合2026年最新版本,完整拆解该仪表盘的部署使用、OpenClaw全平台部署流程、阿里云百炼免费API配置方法,梳理多机器人管理的高频问题,形成“部署-配置-管控-运维”的完整方案,全程不含营销词汇,兼顾实用性与可操作性。阿里云上OpenClaw极速一键部署最简单,步骤详情 访问阿里云OpenClaw一键部署专题页面 了解。
一、OpenClaw-bot-review仪表盘核心价值与功能解析
这款开源仪表盘的核心优势在于“轻量无依赖、可视化直观、功能全覆盖”,无需额外配置数据库,直接读取OpenClaw原生配置文件与会话数据,一分钟即可启动,完美解决多机器人管理的六大核心痛点:
1. 机器人总览:全局状态一目了然
以卡片墙形式展示所有已部署机器人,每个卡片清晰标注机器人名称、专属emoji、绑定模型、对接平台(飞书、Discord等)、会话统计数据与Gateway健康状态,无需逐一登录容器或查看配置文件,即可快速掌握所有机器人的运行情况,避免因服务异常未及时发现导致任务中断。
2. 模型管理:统一管控与连通性测试
整合所有已配置的模型服务提供商(provider)与具体模型,详细列出每个模型的上下文窗口大小、最大输出token数、推理能力支持等关键参数。支持一键测试模型连通性,无需执行命令行即可验证API配置是否有效,解决多模型切换后难以快速排查连接问题的痛点。
3. 会话管理:全量记录与用量统计
按机器人分类展示所有历史会话,自动识别私聊、群聊、定时任务等会话类型,清晰统计每条会话的token消耗情况。支持会话检索与筛选,便于追溯任务执行记录、核对资源消耗,避免因多机器人并发运行导致token用量失控。
4. 统计面板:数据可视化分析
以SVG图表形式直观展示token消耗趋势与平均响应时间,支持按天、周、月切换时间维度,帮助用户掌握资源使用规律,合理规划免费额度或付费套餐,避免超额扣费。同时,响应时间统计可反映模型与机器人的运行效率,为优化配置提供数据支撑。
5. 技能管理:集中管控与快速筛选
整合所有已安装的技能(内置技能、扩展技能、自定义技能),支持按名称、类型、状态筛选,无需进入容器目录即可查看技能安装情况。支持快速启用/禁用技能,简化多机器人技能配置的重复操作,提升运维效率。
6. 告警中心:异常及时预警
支持自定义告警规则,包括模型不可用、机器人无响应、token消耗超标等场景,告警信息可通过飞书等渠道推送,实现异常情况的及时发现与处理,减少因服务中断导致的任务损失,尤其适合7×24小时运行的自动化任务。
7. 趣味互动:像素办公室功能
这一特色功能将每个机器人转化为像素办公室中的动画角色,机器人运行时会呈现走路、坐下、互动等动态效果,让原本枯燥的运维工作变得生动有趣,同时也能通过角色状态直观判断机器人是否正常运行(角色静止可能意味着服务异常)。
此外,仪表盘还支持中英文切换与深色/浅色主题切换,适配不同用户的使用习惯,细节设计贴合实际需求,体现了开发者对OpenClaw使用场景的深度理解。
二、2026年OpenClaw全平台部署流程(含仪表盘适配)
无论是云端多机器人部署还是本地单机器人使用,稳定的OpenClaw运行环境是仪表盘正常工作的基础。以下提供阿里云及本地多系统的OpenClaw部署流程,所有配置均适配仪表盘数据读取需求:
(一)阿里云部署(多机器人协同首选)
阿里云部署支持多容器并行运行,适合部署多个机器人分别执行不同任务,仪表盘可通过配置路径统一管控所有机器人。
阿里云用户零基础部署 OpenClaw 喂饭级步骤流程
第一步:打开访问阿里云OpenClaw一键部署专题页面,找到并点击【一键购买并部署】。



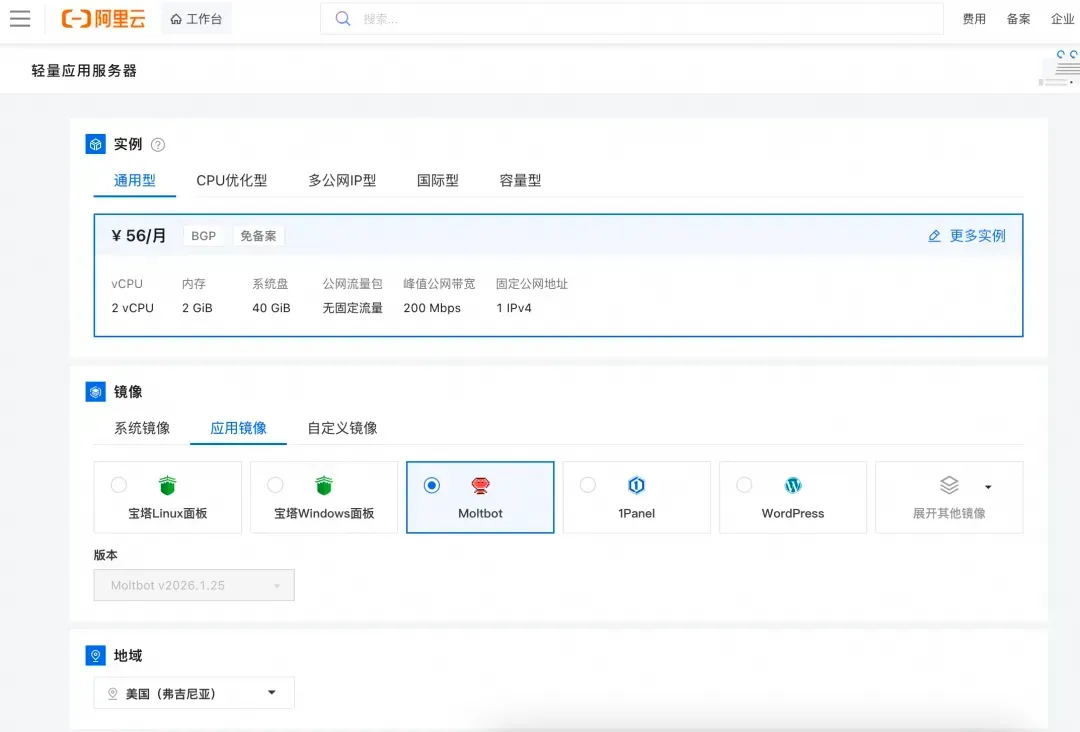
第二步:打开选购阿里云轻量应用服务器,配置参考如下:
- 镜像:OpenClaw(Moltbot)镜像(已经购买服务器的用户可以重置系统重新选择镜像)
- 实例:内存必须2GiB及以上。
- 地域:默认美国(弗吉尼亚),目前中国内地域(除香港)的轻量应用服务器,联网搜索功能受限。
- 时长:根据自己的需求及预算选择。


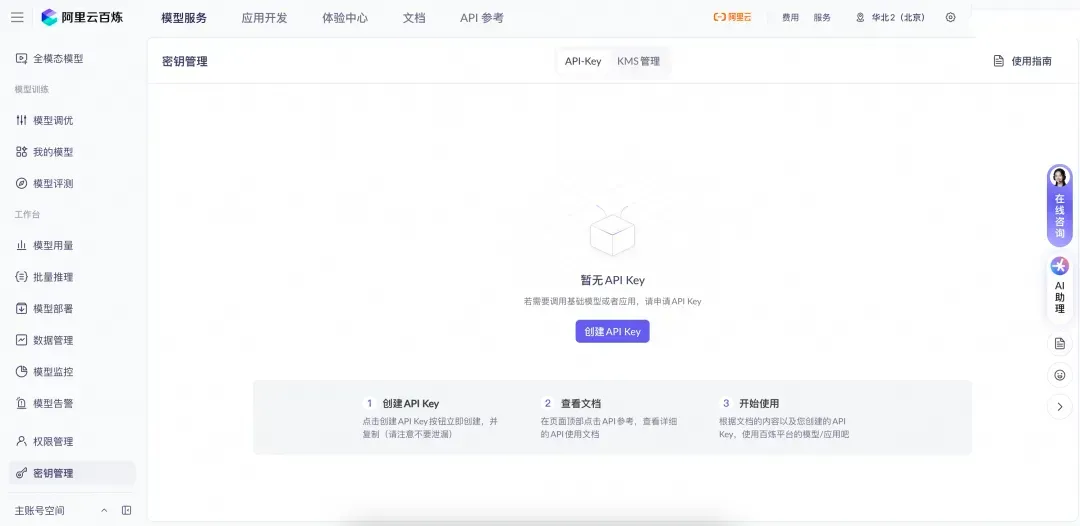
第三步:打开访问阿里云百炼大模型控制台,找到密钥管理,单击创建API-Key。
前往轻量应用服务器控制台,找到安装好OpenClaw的实例,进入「应用详情」放行18789端口、配置百炼API-Key、执行命令,生成访问OpenClaw的Token。
- 端口放通:需要放通对应端口的防火墙,单击一键放通即可。
- 配置百炼API-Key,单击一键配置,输入百炼的API-Key。单击执行命令,写入API-Key。
- 配置OpenClaw:单击执行命令,生成访问OpenClaw的Token。
- 访问控制页面:单击打开网站页面可进入OpenClaw对话页面。
阿里云百炼Coding Plan API-Key 获取、配置保姆级教程:
创建API-Key,推荐访问订阅阿里云百炼Coding Plan,阿里云百炼Coding Plan每天两场抢购活动,从按tokens计费升级为按次收费,可以进一步节省费用!
- 购买后,在控制台生成API Key。注:这里复制并保存好你的API Key,后面要用。

- 回到轻量应用服务器-控制台,单击服务器卡片中的实例 ID,进入服务器概览页。

- 在服务器概览页面单击应用详情页签,进入服务器详情页面。

- 端口放通在OpenClaw使用步骤区域中,单击端口放通下的执行命令,可开放获取OpenClaw 服务运行端口的防火墙。

- 这里系统会列出我们第一步中创建的阿里云百炼 Coding Plan的API Key,直接选择就可以。

- 获取访问地址单击访问 Web UI 面板下的执行命令,获取 OpenClaw WebUI 的地址。


- 远程登录与系统初始化
# 远程连接阿里云服务器
ssh root@你的公网IP
# 系统更新,确保基础环境最新
yum update -y # Alibaba Cloud Linux/CentOS系统
# apt update && apt upgrade -y # Ubuntu系统
- 安装容器环境
# 一键安装Docker
curl -fsSL https://get.docker.com | bash
# 启动Docker并设置开机自启
systemctl daemon-reload
systemctl enable docker
systemctl start docker
# 验证Docker安装成功
docker --version
- 创建多机器人持久化目录
# 为每个机器人创建独立目录(示例创建2个机器人)
mkdir -p /opt/openclaw/bot1/{
config,skills,logs,workspace,memory}
mkdir -p /opt/openclaw/bot2/{
config,skills,logs,workspace,memory}
# 赋予目录读写权限
chmod -R 777 /opt/openclaw
- 拉取镜像与启动多容器
# 拉取2026年稳定版OpenClaw镜像
docker pull openclaw/openclaw:2026-latest
# 启动机器人1(对接飞书,执行定时任务)
docker run -d \
--name openclaw-bot1 \
--restart always \
-p 18789:18789 \
-v /opt/openclaw/bot1/config:/app/config \
-v /opt/openclaw/bot1/skills:/app/skills \
-v /opt/openclaw/bot1/logs:/app/logs \
-v /opt/openclaw/bot1/workspace:/app/workspace \
-v /opt/openclaw/bot1/memory:/app/memory \
-e TZ=Asia/Shanghai \
-e SANDBOX_MODE=true \
openclaw/openclaw:2026-latest
# 启动机器人2(对接Discord,执行数据抓取任务)
docker run -d \
--name openclaw-bot2 \
--restart always \
-p 18790:18789 \
-v /opt/openclaw/bot2/config:/app/config \
-v /opt/openclaw/bot2/skills:/app/skills \
-v /opt/openclaw/bot2/logs:/app/logs \
-v /opt/openclaw/bot2/workspace:/app/workspace \
-v /opt/openclaw/bot2/memory:/app/memory \
-e TZ=Asia/Shanghai \
-e SANDBOX_MODE=true \
openclaw/openclaw:2026-latest
- 初始化与配置共享(适配仪表盘)
# 进入每个容器执行初始化
docker exec -it openclaw-bot1 bash
openclaw init --full
exit
docker exec -it openclaw-bot2 bash
openclaw init --full
exit
# 创建配置共享目录,便于仪表盘统一读取
ln -s /opt/openclaw/bot1/config /opt/openclaw/shared/config-bot1
ln -s /opt/openclaw/bot2/config /opt/openclaw/shared/config-bot2
(二)Windows11本地部署
Windows11部署适合个人用户或单机器人使用,仪表盘可直接读取本地配置文件,步骤简洁易操作。
- 启用WSL2
# 以管理员权限打开PowerShell,启用WSL2
wsl --install
# 重启电脑,完成WSL2配置
- 安装Docker与拉取镜像
# 启动Docker Desktop(需提前从官网下载安装)
# 拉取OpenClaw稳定版镜像
docker pull openclaw/openclaw:2026-latest
# 创建本地持久化目录
mkdir -p $HOME/OpenClaw/{
config,skills,logs,workspace,memory}
- 启动容器与初始化
# 启动容器
docker run -d `
--name openclaw `
--restart always `
-p 18789:18789 `
-v $HOME/OpenClaw/config:/app/config `
-v $HOME/OpenClaw/skills:/app/skills `
-v $HOME/OpenClaw/logs:/app/logs `
-v $HOME/OpenClaw/workspace:/app/workspace `
-v $HOME/OpenClaw/memory:/app/memory `
-e TZ=Asia/Shanghai `
openclaw/openclaw:2026-latest
# 进入容器初始化
docker exec -it openclaw bash
openclaw init --full
(三)MacOS本地部署
MacOS部署适配Intel与M系列芯片,运行稳定,仪表盘可通过本地路径直接读取配置数据。
- 安装依赖环境
# 安装Homebrew(已安装可跳过)
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
# 安装Docker
brew install docker
open -a Docker
# 等待Docker启动完成
- 创建目录与拉取镜像
# 创建本地持久化目录
mkdir -p ~/OpenClaw/{
config,skills,logs,workspace,memory}
# 拉取OpenClaw镜像
docker pull openclaw/openclaw:2026-latest
- 启动容器与初始化
# 启动容器
docker run -d \
--name openclaw \
--restart always \
-p 18789:18789 \
-v ~/OpenClaw/config:/app/config \
-v ~/OpenClaw/skills:/app/skills \
-v ~/OpenClaw/logs:/app/logs \
-v ~/OpenClaw/workspace:/app/workspace \
-v ~/OpenClaw/memory:/app/memory \
-e TZ=Asia/Shanghai \
openclaw/openclaw:2026-latest
# 进入容器初始化
docker exec -it openclaw bash
openclaw init --full
(四)Linux本地部署(Ubuntu/Debian)
Linux部署适合技术用户,运行效率高,支持多机器人本地部署与仪表盘统一管控。
- 安装Docker环境
# 系统更新
apt update && apt upgrade -y
# 安装Docker
curl -fsSL https://get.docker.com | bash
# 启动Docker并设置开机自启
systemctl enable docker
systemctl start docker
- 创建目录与启动容器
# 创建多机器人持久化目录
mkdir -p /opt/openclaw/{
bot1,bot2}/{
config,skills,logs,workspace,memory}
chmod -R 777 /opt/openclaw
# 拉取镜像
docker pull openclaw/openclaw:2026-latest
# 启动机器人1
docker run -d \
--name openclaw-bot1 \
--restart always \
-p 18789:18789 \
-v /opt/openclaw/bot1/config:/app/config \
-v /opt/openclaw/bot1/skills:/app/skills \
-v /opt/openclaw/bot1/logs:/app/logs \
-v /opt/openclaw/bot1/workspace:/app/workspace \
-v /opt/openclaw/bot1/memory:/app/memory \
-e TZ=Asia/Shanghai \
openclaw/openclaw:2026-latest
# 启动机器人2
docker run -d \
--name openclaw-bot2 \
--restart always \
-p 18790:18789 \
-v /opt/openclaw/bot2/config:/app/config \
-v /opt/openclaw/bot2/skills:/app/skills \
-v /opt/openclaw/bot2/logs:/app/logs \
-v /opt/openclaw/bot2/workspace:/app/workspace \
-v /opt/openclaw/bot2/memory:/app/memory \
-e TZ=Asia/Shanghai \
openclaw/openclaw:2026-latest
# 初始化所有机器人
docker exec -it openclaw-bot1 bash -c "openclaw init --full"
docker exec -it openclaw-bot2 bash -c "openclaw init --full"
三、OpenClaw-bot-review仪表盘全平台部署流程
仪表盘支持直接部署与Docker部署两种方式,适配不同用户的使用习惯,部署后可自动读取OpenClaw配置数据,无需额外复杂配置。
(一)直接部署(适合本地使用)
- 安装Git与Node.js
# Windows11(PowerShell)
winget install Git.Git
winget install OpenJS.NodeJS
# MacOS
brew install git node
# Linux(Ubuntu/Debian)
apt install -y git nodejs npm
- 克隆仓库与安装依赖
# 克隆仓库
git clone https://github.com/xmanrui/OpenClaw-bot-review.git
cd OpenClaw-bot-review
# 安装依赖
npm install
- 启动仪表盘
# 启动开发服务器
npm run dev
- 访问与配置
# 浏览器访问
http://localhost:3000
# 若OpenClaw配置目录非默认路径,需设置环境变量(示例)
# Windows11
$env:OPENCLAW_HOME="$HOME/OpenClaw"
npm run dev
# MacOS/Linux
export OPENCLAW_HOME=~/OpenClaw
npm run dev
(二)Docker部署(适合多机器人管控、长期运行)
- 构建镜像与启动容器
# 克隆仓库
git clone https://github.com/xmanrui/OpenClaw-bot-review.git
cd OpenClaw-bot-review
# 构建镜像
docker build -t openclaw-dashboard .
# 启动容器(默认路径)
docker run -d \
--name openclaw-dashboard \
--restart always \
-p 3000:3000 \
openclaw-dashboard
# 自定义配置路径(多机器人共享目录)
docker run -d \
--name openclaw-dashboard \
--restart always \
-p 3000:3000 \
-e OPENCLAW_HOME=/opt/openclaw/shared \
-v /opt/openclaw/shared:/opt/openclaw/shared \
openclaw-dashboard
- 访问仪表盘
http://localhost:3000 # 本地部署
http://公网IP:3000 # 阿里云部署(需开放3000端口)
(三)仪表盘使用基础操作
- 首次访问:无需登录,直接进入总览页面,系统自动扫描配置目录下的所有机器人数据;
- 模型测试:在“模型列表”页面点击对应模型的“测试连通性”按钮,快速验证API配置;
- 会话筛选:在“会话管理”页面按机器人名称、会话类型、时间范围筛选目标会话;
- 告警配置:进入“告警中心”,设置触发条件(如token日消耗超过10000)与通知渠道(飞书);
- 主题切换:点击页面右上角图标,切换中英文或深色/浅色主题;
- 像素办公室:进入“趣味互动”页面,查看机器人对应的像素角色动态,判断服务运行状态。
四、阿里云百炼Coding Plan免费API配置(适配多机器人)
多机器人运行需依赖稳定的模型API,阿里云百炼免费额度可满足日常使用需求,以下提供单机器人与多机器人共享API的配置方法:
1. 获取API Key
- 访问登录阿里云百炼大模型服务平台,进入Coding Plan页面;
- 完成实名认证后,领取90天免费额度;
- 创建API Key(以
sk-sp-开头),记录API Key与基础地址。
2. 单机器人API配置
# 进入目标机器人容器
docker exec -it openclaw-bot1 bash
# 编辑配置文件
nano /app/config/openclaw.json
3. 单机器人完整配置示例
{
"model": {
"provider": "alibaba-cloud",
"apiKey": "你的sk-sp-开头API Key",
"baseUrl": "https://dashscope.aliyuncs.com/compatible-mode/v1",
"defaultModel": "bailian/qwen-turbo",
"parameters": {
"temperature": 0.3,
"maxTokens": 4096,
"stream": true
}
},
"skills": {
"autoLoad": true,
"safeMode": true
},
"agent": {
"maxSteps": 30,
"autoRepair": true,
"memoryType": "long-term"
},
"security": {
"apiKeyProtection": true,
"disableDangerousCommands": true,
"sandboxEnabled": true
}
}
4. 多机器人共享API配置(避免重复配置)
# 创建共享配置文件
mkdir -p /opt/openclaw/shared/config-template
nano /opt/openclaw/shared/config-template/openclaw.json
# 写入共享模型配置
{
"model": {
"provider": "alibaba-cloud",
"apiKey": "你的sk-sp-开头API Key",
"baseUrl": "https://dashscope.aliyuncs.com/compatible-mode/v1",
"defaultModel": "bailian/qwen-turbo",
"parameters": {
"temperature": 0.3,
"maxTokens": 4096,
"stream": true
}
}
}
# 每个机器人配置文件引用共享模型配置
docker exec -it openclaw-bot1 bash
nano /app/config/openclaw.json
在机器人配置文件中添加引用:
{
"extends": "/opt/openclaw/shared/config-template/openclaw.json",
"skills": {
"autoLoad": true,
"safeMode": true
},
"agent": {
"maxSteps": 30,
"autoRepair": true
}
}
5. 配置生效与验证
# 重启所有机器人容器
docker restart openclaw-bot1 openclaw-bot2
# 通过仪表盘验证:进入“模型列表”页面,测试模型连通性
五、高频问题与解决方案
1. 仪表盘无法读取机器人数据
- 核心原因:配置路径设置错误、目录权限不足、OpenClaw配置文件格式错误;
- 解决方案:
- 确认仪表盘的OPENCLAW_HOME环境变量指向正确的OpenClaw配置目录;
- 赋予配置目录读写权限,
chmod -R 777 /opt/openclaw/shared; - 检查OpenClaw配置文件是否为标准JSON格式,可使用在线工具校验;
- 重启仪表盘容器,
docker restart openclaw-dashboard。
2. 模型测试显示连通性失败
- 核心原因:API Key错误、配置格式错误、免费额度耗尽、网络不通;
- 解决方案:
- 核对API Key,确保无空格、换行或拼写错误;
- 检查配置文件中的baseUrl是否正确(阿里云百炼固定为
https://dashscope.aliyuncs.com/compatible-mode/v1); - 登录阿里云百炼控制台,查看免费额度使用情况;
- 阿里云部署需确保服务器可访问公网,本地部署检查网络通畅性。
3. 多机器人启动后端口冲突
- 核心原因:多个容器映射相同的主机端口;
- 解决方案:
- 启动容器时指定不同的主机端口,如
-p 18789:18789、-p 18790:18789; - 查看端口占用情况,
netstat -tuln | grep 18789(Linux/MacOS); - 停止占用端口的容器,
docker stop 容器ID,重新启动目标容器。
- 启动容器时指定不同的主机端口,如
4. 仪表盘统计数据不更新
- 核心原因:会话数据未实时同步、仪表盘缓存未刷新;
- 解决方案:
- 确认OpenClaw会话数据已写入本地目录(容器挂载正常);
- 点击仪表盘页面右上角“刷新”按钮,手动同步数据;
- 重启仪表盘容器,清除缓存。
5. 告警信息未收到
- 核心原因:告警规则未启用、通知渠道配置错误、触发条件未满足;
- 解决方案:
- 进入仪表盘“告警中心”,确认告警规则已启用;
- 核对通知渠道配置(如飞书机器人WebHook地址);
- 测试告警触发,手动设置低阈值(如token消耗超过100),验证通知是否正常。
6. 像素办公室角色静止不动
- 核心原因:对应机器人服务异常、未运行或网络不通;
- 解决方案:
- 在仪表盘“机器人总览”页面查看该机器人的Gateway状态;
- 启动或重启机器人容器,
docker start openclaw-bot1; - 检查机器人日志,排查服务异常原因,
docker logs openclaw-bot1 --tail 50。
六、多机器人管理优化建议
- 目录规范化:为每个机器人创建独立目录,统一命名规则(如按功能命名bot-task、bot-notify),便于仪表盘分类管理;
- API共享配置:多机器人使用同一模型API时,采用共享配置文件方式,避免重复配置与API Key泄露;
- 资源合理分配:根据机器人任务复杂度分配容器资源(--memory、--cpus参数),避免资源竞争导致运行卡顿;
- 定期备份配置:定期备份OpenClaw配置文件与仪表盘告警规则,避免数据丢失;
- 日志集中管理:将所有机器人的logs目录挂载到共享目录,便于通过仪表盘或命令行统一查看日志;
- 技能统一管控:通过仪表盘“技能管理”页面,统一启用/禁用多机器人的共性技能,提升运维效率。
七、总结
2026年,OpenClaw-bot-review开源仪表盘的出现,填补了多机器人可视化管理的空白,通过轻量无依赖的设计、全面的功能覆盖与趣味化的互动体验,让多机器人运维从“命令行繁琐操作”升级为“一屏全览、一键管控”。本文提供的OpenClaw全平台部署流程、仪表盘部署使用方法、阿里云百炼API配置方案,形成了一套完整的多机器人管理体系,无论是个人用户还是团队协作,都能通过这套方案实现高效、稳定的机器人管控。
多机器人管理的核心痛点在于“信息分散、操作繁琐、异常难发现”,而这款仪表盘通过直接读取原生配置与会话数据,无需额外数据库支撑,完美解决了这些问题。同时,趣味化的像素办公室功能让运维工作不再枯燥,体现了开源项目对用户体验的关注。
随着OpenClaw生态的不断完善,类似的第三方工具会越来越多,用户无需关注底层技术细节,即可通过可视化工具实现复杂的管理需求。通过本文的指导,用户可快速搭建多机器人运行环境与可视化管控平台,充分发挥OpenClaw的自动化优势,适配更多复杂场景需求。
