
为什么操作型工作反而不急着用智能体领航员?
看起来最“适合自动化”的工作,恰恰不是领航员的首选落点
一谈到智能体领航员,很多人的第一反应是:
那它肯定会先用在操作型工作上吧?
流程清晰、重复性强、规则明确,看起来最适合“交给 AI”。
这个判断非常合理,但也非常容易走偏。
事实很可能正相反:
操作型工作,恰恰不是智能体领航员最先出现的地方。
一、先给结论:
操作型工作不缺“领航”,缺的是“稳定执行”
我们先区分两个经常被混在一起的概念:
- 自动化 / 智能执行
- 智能体领航员
它们解决的不是同一类问题。
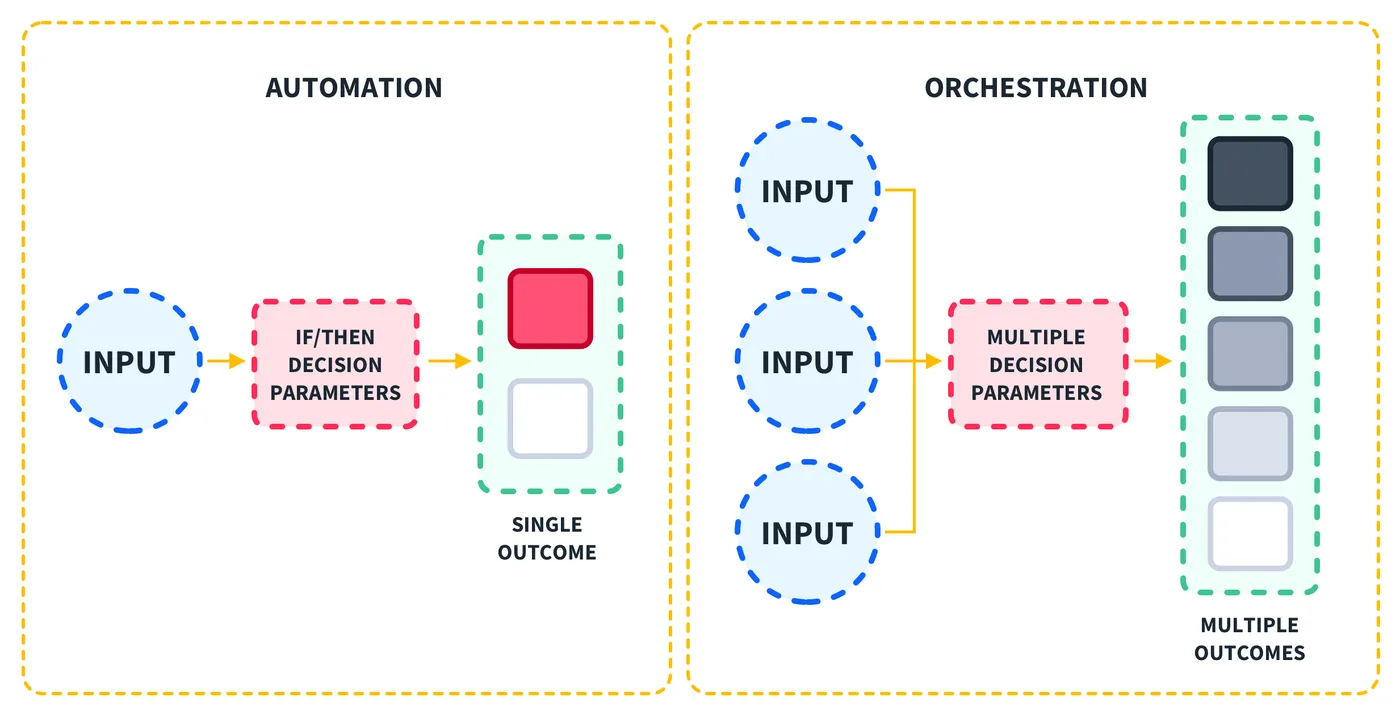
操作型工作的核心痛点是:
- 能不能按标准把事做完
- 能不能稳定、可控、不出错
而智能体领航员解决的核心痛点是:
- 现在该不该继续
- 是否需要调整方向
- 什么时候应该停下来
这两者的重心,完全不同。
二、什么是典型的“操作型工作”?
操作型工作并不等于“简单工作”,
它们往往非常专业,只是判断边界非常清晰。
例如:
- 生产线作业
- 运维执行、巡检
- 标准化测试
- 财务记账、对账
- 规则明确的审批流程
它们有一个共同特征:
成功与失败,通常是可快速、明确判断的。
三、操作型工作真正害怕的是什么?
不是“没人判断方向”,而是三件事:
- 执行不稳定
- 流程被打断
- 不可控的自主行为
对这类工作来说:
“多做一步判断”,
往往比“少做一步执行”更危险。
四、为什么“领航能力”在这里反而是负担?
智能体领航员的核心能力之一,是:
在不确定中做判断。
但在操作型工作中:
- 不确定性本来就被压缩到最低
- 大部分决策已经前置进规则
- 临场判断反而是风险来源
换句话说:
操作型工作要的不是“聪明”,而是“守规矩”。
五、一个关键区别:
谁在为结果兜底?
在操作型工作中:
- 风险成本高
- 责任链条清晰
- 出错往往是事故级别

这意味着:
系统不需要“自主判断何时停”,
而需要“在任何情况下都不乱动”。
而这,与领航员的角色是冲突的。
六、那操作型工作完全不需要智能体吗?
并不是。
只是它们更需要的是“执行型智能体”,而不是“领航型智能体”。
典型组合是:
- 人类或规则系统负责判断
- AI 负责稳定、高质量执行
在这种结构下,引入“领航员”反而会:
- 增加系统复杂度
- 引入新的不确定性
- 让责任边界变得模糊
七、什么时候操作型工作才会需要“领航员”?
只有在一种情况下,操作型工作才会真正需要智能体领航员:
当它开始演变成“长期、跨阶段、非即时可验证”的工作。
例如:
- 大规模系统运维中的全局状态判断
- 多系统联动下的异常升级决策
- 长时间运行系统的策略调整
此时,它已经不再是纯粹的操作型工作,
而是进入了知识型判断区间。
八、一个非常实用的判断标准
你可以用一句话来判断:
这项工作,是“做错了会立刻知道”,
还是“做错了很久以后才发现”?
- 前者 → 不急着用领航员
- 后者 → 极有可能需要领航员
写在最后
操作型工作,并不是智能体领航员的“天然舞台”,
反而是对“自主判断”最谨慎、最保守的领域。
这并不是技术落后,
而是一种对风险与责任的理性选择。
真正的路径,很可能是:
先在知识型工作中学会“怎么领航”,
再慢慢把这种能力,引入到更严肃的操作系统中。
留给读者的互动问题
在你的工作中,
有没有哪一类任务是执行非常标准,但判断必须极其谨慎的?你觉得它适合引入“智能体领航员”吗?




